摘 要:本发明涉及土壤检测技术领域,具体公开一种苎麻种植用土壤成分检测装置及方法,其中检测装置包括基座,基座通过四周的支撑柱设置于待测地面上,基座的下部设有分层检测机构,分层检测机构包括检测杆,检测杆包括竖直设置的导向探管,导向探管的顶端通过推动机构与基座相连接;导向探管的外部开设有多个检测窗口,在导向探管的内壁对应多个检测窗口位置处贴设有遮挡基板,遮挡基板与导向探管转动配合,在遮挡基板的外表面分别设有与检测窗口相配合的柔性遮挡部和检测传感器阵列部;初始时,遮挡基板通过外表面的柔性遮挡部对检测窗口进行遮挡;实现装置对不同深度的土壤进行分层精准检测,并改善装置使用效果。
技术要点
1.一种苎麻种植用土壤成分检测装置,所述检测装置包括基座(1),所述基座(1)通过四周的支撑柱设置于待测地面上,其特征在于,所述基座(1)的下部设有分层检测机构,所述分层检测机构包括检测杆,所述检测杆包括竖直设置的导向探管(21),所述导向探管(21)的顶端通过推动机构(22)与所述基座(1)相连接;所述导向探管(21)的外部开设有多个检测窗口(23),在所述导向探管(21)的内壁对应多个所述检测窗口(23)位置处贴设有遮挡基板(24),所述遮挡基板(24)与所述导向探管(21)转动配合,在所述遮挡基板(24)的外表面分别设有与检测窗口(23)相配合的柔性遮挡部(241)和检测传感器阵列部(242);初始时,所述遮挡基板(24)通过外表面的柔性遮挡部(241)对所述检测窗口(23)进行遮挡;所述导向探管(21)的内部还设有移动杆(25),所述移动杆(25)与所述导向探管(21)滑动配合,在所述移动杆(25)的底端还设有转动驱动件,所述转动驱动件的外侧表面与遮挡基板(24)的内表面之间设有相适配的磁性吸附部,当转动驱动件在移动杆(25)的带动下竖直移动至遮挡基板(24)所处位置时,通过所述磁性吸附部的相互吸合,使转动驱动件与遮挡基板(24)形成磁吸连接;此时转动驱动件旋转后带动遮挡基板(24)旋转使检测传感器阵列部(242)转动至检测窗口(23)位置处。
2.根据权利要求1所述的一种苎麻种植用土壤成分检测装置,其特征在于,所述导向探管(21)与移动杆(25)之间通过滑轨模组滑动连接,所述滑轨模组包括沿导向探管(21)的轴向方向布设在其内部的电动滑轨(211)和设于移动杆(25)外部并与电动滑轨(211)滑动配合的滑块。
3.根据权利要求1所述的一种苎麻种植用土壤成分检测装置,其特征在于,所述转动驱动件包括与外部与遮挡基板(24)相适配的转动块(26),所述转动块(26)的上部与所述移动杆(25)底端转动连接,且在所述移动杆(25)的底端内部设有输出端与所述转动块(26)相连接的转动电机(251)。
4.根据权利要求3所述的一种苎麻种植用土壤成分检测装置,其特征在于,所述遮挡基板(24)与所述导向探管(21)内壁之间设有旋转结构,所述旋转结构包括与导向探管的内壁曲面相贴合并分别位于检测窗口(23)上部和下部的转动卡槽(281),两个所述转动卡槽(281)的长度大于所述遮挡基板(24)的长度,且两个所述转动卡槽(281)之间的宽度不小于所述遮挡基板(24)的宽度;所述遮挡基板(24)嵌设于两个所述转动卡槽(281)之间并与所述转动卡槽(281)滑动配合。
5.根据权利要求3所述的一种苎麻种植用土壤成分检测装置,其特征在于,所述磁性吸附部包括相互磁吸配合的磁性吸附块(271)和磁吸连接块(272),所述磁性吸附块(271)固定连接于所述遮挡基板(24)的内表面,所述磁性吸附块(271)的表面向内凹陷形成插接槽(2711),所述插接槽(2711)内设有第一导电接触片,所述第一导电接触片与所述检测传感器阵列部(242)之间电性连接,所述磁吸连接块(272)安装于转动块(26)的外部,且在所述磁吸连接块(272)对应磁性吸附块(271)的端部设有弹性伸缩的磁吸插头(2721),所述磁吸插头(2721)与所述插接槽(2711)相适配,且所述磁吸插头(2721)的端部连接有第二导电接触片,所述第二导电接触片与嵌设于转动块(26)内部的蓄电模块(261)电性连接。
6.根据权利要求1所述的一种苎麻种植用土壤成分检测装置,其特征在于,所述检测传感器阵列部(242)包括呈矩形状分布于所述遮挡基板(24)的外表面并沿周向依次划分的多个检测区域(2421),多个所述检测区域(2421)相互间隔设置并分别对应设有土壤pH值传感器、有机质检测传感器与氮磷钾离子传感器,所述检测传感器阵列部(242)的内部还嵌设有弹性膨胀层(2422),且所述弹性膨胀层(2422)相背于遮挡基板(24)的一侧分别与对应的各检测区域(2421)相连接,在所述弹性膨胀层(2422)内部还设有气腔夹层;所述柔性遮挡部(241)凸出于遮挡基板(24)外表面设置,在所述柔性遮挡部(241)的内部嵌设有密封的气囊挤压层(2411),所述气囊挤压层(2411)内填充有气体介质,且所述气囊挤压层(2411)与气腔夹层之间通过开设于遮挡基板(24)内部的微型气道连通。
7.根据权利要求6所述的一种苎麻种植用土壤成分检测装置,其特征在于,所述基座(1)的上部还设有控制端,所述控制端包括检测数据处理模块,所述检测数据处理模块与所述检测传感器阵列部(242)信号连接,用于接收其传输而至的土壤检测数据并发送至外界终端。
8.一种苎麻种植用土壤成分检测方法,根据权利要求1?7任一项所述的一种苎麻种植用土壤成分检测装置,其特征在于,该方法包括如下步骤:
步骤1,装置部署:将基座(1)通过四周的支撑柱固定于待测地面,检查并确认初始状态下,遮挡基板(24)外表面的柔性遮挡部(241)对导向探管(21)上所有检测窗口(23)形成封闭遮挡;
步骤2,导向探管(21)插入:根据苎麻种植地待测土壤的目标深度范围,通过推动机构(22)驱动导向探管(21)竖直下移,使导向探管(21)插入土壤,直至导向探管(21)插入土壤的深度覆盖目标检测层,并确保检测窗口(23)与待检测土层深度位置相对应;
步骤3,磁吸对接;通过电动滑轨(211)和滑块控制移动杆(25)在导向探管(21)内下滑,以带动转动驱动件移动至目标检测深度对应的遮挡基板(24)位置,通过磁性吸附部的磁吸配合使转动块(26)与遮挡基板(24)形成周向联动,同时磁吸插头(2721)插入插接槽(2711)内,使第一导电接触片与第二导电接触片连接导通,蓄电模块(261)为检测传感器阵列部(242)供电;
步骤4,检测启动:通过注水仓(3)与微流管道(31)向对应检测区域(2421)的渗水孔(32)注入预设量的检测辅助液,进而使渗水孔(32)将检测辅助液缓慢均匀的渗入检测窗口(23)四周的土壤中,从而使待测区域的土壤形成待测土壤溶液区,此时,控制转动电机(251)使其驱动转动块(26)旋转,通过转动块(26)与遮挡基板(24)的磁吸联动作用,带动遮挡基板(24)沿导向探管(21)内壁的转动卡槽(281)滑动旋转并逐渐远离检测窗口(23),直至检测传感器阵列部(242)的检测区域(2421)与检测窗口(23)相对应;
步骤5,土壤参数数据采集:在柔性遮挡部(241)逐渐旋转远离检测窗口(23)时,柔性遮挡部(241)的气囊挤压层(2411)与导向探管(21)内壁挤压,以使气囊挤压层(2411)内的气体介质进入至气腔夹层中,并使弹性膨胀层(2422)进行弹性膨胀,实现检测区域(2421)通过检测窗口(23)向外凸出,并通过转动块(26)的旋转,以使多个检测区域(2421)的土壤pH值传感器、有机质检测传感器与氮磷钾离子传感器的探头部分别与当前深度的待测土壤溶液区进行对应接触,从而对土壤成分参数进行依次数据采集并传输至检测数据处理模块,检测数据处理模块接收数据并处理后发送至外界终端;
步骤6,分层检测:完成当前目标深度的土壤参数数据采集后,执行以下操作以实现对多个深度的分层检测:若待测土壤深度分层高度与检测窗口(23)间距一致,保持导向探管(21)位置不变,通过滑轨模组驱动移动杆(25)下滑,带动转动驱动件依次对接导向探管(21)上其他检测窗口(23)内的遮挡基板(24),重复步骤3?5完成对应深度检测;若待测土壤深度分层高度与检测窗口(23)间距不一致,通过推动机构(22)微调导向探管(21)竖直位置,使目标深度与某一检测窗口(23)相对应,再通过滑轨模组驱动移动杆(25)对接该检测窗口(23)的遮挡基板(24),重复步骤3?5完成目标深度检测;
步骤7,检测复位:所有深度检测完成后,通过转动驱动件驱动遮挡基板(24)旋转回初始位置封闭检测窗口(23),控制移动杆(25)上移使转动驱动件脱离遮挡基板(24),同时启动推动机构(22)拔出导向探管(21)。。
技术领域
本发明涉及土壤检测技术领域,具体公开了一种苎麻种植用土壤成分检测装置及方法。
背景技术
苎麻作为我国重要的特色纤维作物,其生长与土壤条件紧密相关,核心在于其根系分层特性与土壤成分分层规律高度适配,苎麻根系繁茂且分布深度不一,其中浅层须根主要吸收表层速效养分与有机质,深层主根侧重获取深层稳定营养与水分;而土壤随深度增加,pH值、有机质及氮磷钾含量呈显著分层差异,这种适配关系直接影响苎麻纤维品质与产量,因此准确掌握土壤不同深度成分分布,是实现苎麻精准种植的关键。
目前传统检测大多采用“取样?处理?检测”流程,采集土壤后经切片、溶解等预处理,会不可避免混合不同深度样品,丢失土壤自然分层特性,仅能得出整体成分平均含量,无法区分深浅层养分来源,导致检测结果偏差。
而近年出现的便携式现场检测技术(如手持传感器、插入式探头)虽解决时效性问题,但仍存缺陷:一是分层精度低,需多次插拔探头获取不同深度数据,易压实土壤、扰动根系;二是传感器直接暴露,易被泥土、石子损伤或受湿气锈蚀,缩短装置寿命,进而导致苎麻种植管理失准,并致使最终苎麻纤维品质产量受到不利影响。
有鉴于此,亟待提出一种苎麻种植用土壤成分检测装置及方法。
发明内容
本发明目的在于提供一种苎麻种植用土壤成分检测装置及方法,以至少解决现有技术中存在的上述技术问题之一。
具体而言,本发明通过下述技术方案实现:
一种苎麻种植用土壤成分检测装置,所述检测装置包括基座,所述基座通过四周的支撑柱设置于待测地面上,所述基座的下部设有分层检测机构,所述分层检测机构包括检测杆,所述检测杆包括竖直设置的导向探管,所述导向探管的顶端通过推动机构与所述基座相连接;
所述导向探管的外部开设有多个检测窗口,在所述导向探管的内壁对应多个所述检测窗口位置处贴设有遮挡基板,所述遮挡基板与所述导向探管转动配合,在所述遮挡基板的外表面分别设有与检测窗口相配合的柔性遮挡部和检测传感器阵列部;
初始时,所述遮挡基板通过外表面的柔性遮挡部对所述检测窗口进行遮挡;
所述导向探管的内部还设有移动杆,所述移动杆与所述导向探管滑动配合,在所述移动杆的底端还设有转动驱动件,所述转动驱动件的外侧表面与遮挡基板的内表面之间设有相适配的磁性吸附部,当转动驱动件在移动杆的带动下竖直移动至遮挡基板所处位置时,通过所述磁性吸附部的相互吸合,使转动驱动件与遮挡基板形成磁吸连接;
此时转动驱动件旋转后带动遮挡基板旋转使检测传感器阵列部转动至检测窗口位置处。
一种苎麻种植用土壤成分检测方法,根据一种苎麻种植用土壤成分检测装置,该方法包括如下步骤:
步骤1,装置部署:将基座通过四周的支撑柱固定于待测地面,检查并确认初始状态下,遮挡基板外表面的柔性遮挡部对导向探管上所有检测窗口形成封闭遮挡;
步骤2,导向探管插入:根据苎麻种植地待测土壤的目标深度范围,通过推动机构驱动导向探管竖直下移,使导向探管插入土壤,直至导向探管插入土壤的深度覆盖目标检测层,并确保检测窗口与待检测土层深度位置相对应;
步骤3,磁吸对接;通过电动滑轨和滑块控制移动杆在导向探管内下滑,以带动转动驱动件移动至目标检测深度对应的遮挡基板位置,通过磁性吸附部的磁吸配合使转动块与遮挡基板形成周向联动,同时磁吸插头插入插接槽内,使第一导电接触片与第二导电接触片连接导通,蓄电模块为检测传感器阵列部供电;
步骤4,检测启动:通过注水仓与微流管道向对应检测区域的渗水孔注入预设量的检测辅助液,进而使渗水孔将检测辅助液缓慢均匀的渗入检测窗口四周的土壤中,从而使待测区域的土壤形成待测土壤溶液区,此时,控制转动电机使其驱动转动块旋转,通过转动块与遮挡基板的磁吸联动作用,带动遮挡基板沿导向探管内壁的转动卡槽滑动旋转并逐渐远离检测窗口,直至检测传感器阵列部的检测区域与检测窗口相对应;
步骤5,土壤参数数据采集:在柔性遮挡部逐渐旋转远离检测窗口时,柔性遮挡部的气囊挤压层与导向探管内壁挤压,以使气囊挤压层内的气体介质进入至气腔夹层中,并使弹性膨胀层进行弹性膨胀,实现检测区域通过检测窗口向外凸出,并通过转动块的旋转,以使多个检测区域的土壤pH值传感器、有机质检测传感器与氮磷钾离子传感器的探头部分别与当前深度的待测土壤溶液区进行对应接触,从而对土壤成分参数进行依次数据采集并传输至检测数据处理模块,检测数据处理模块接收数据并处理后发送至外界终端;
步骤6,分层检测:完成当前目标深度的土壤参数数据采集后,执行以下操作以实现对多个深度的分层检测:
若待测土壤深度分层高度与检测窗口间距一致,保持导向探管位置不变,通过滑轨模组驱动移动杆下滑,带动转动驱动件依次对接导向探管上其他检测窗口内的遮挡基板,重复步骤3?5完成对应深度检测;
若待测土壤深度分层高度与检测窗口间距不一致,通过推动机构微调导向探管竖直位置,使目标深度与某一检测窗口相对应,再通过滑轨模组驱动移动杆对接该检测窗口的遮挡基板,重复步骤3?5完成目标深度检测;
步骤7,检测复位;所有深度检测完成后,通过转动驱动件驱动遮挡基板旋转回初始位置封闭检测窗口,控制移动杆上移使转动驱动件脱离遮挡基板,同时启动推动机构拔出导向探管。
与现有技术相比,本发明至少具有如下优点和有益效果:
(1)本发明通过设置的分层检测机构,利用推动机构驱动导向探管单次竖直插入土壤,避免传统“取样?处理?检测”导致的深浅层土壤混合,实现土壤分层数据原位保留,并且无需多次插拔探头,减少土壤压实与苎麻根系扰动,同时巧妙利用导向探管外部分布的多个检测窗口,能够有效检测不同深度的土壤养分参数,从而精准匹配土壤中不同深度的苎麻浅层须根和深层主根的土壤分层吸收需求,提升检测数据对苎麻种植管理的适配性。
(2)本发明通过设置的磁性吸附部,结合可旋转遮挡基板动态启闭设计,非检测阶段柔性遮挡部封闭检测窗口,防止传感器受土壤污染或损坏,而检测时利用磁性吸附部的精准对接,使检测传感器阵列部与蓄电模块进行稳定供电,并通过旋转控制遮挡基板的检测区域精确对接于检测窗口以同步采集多种土壤参数数据,从而提升装置的检测精度和工作寿命,使其使用效果得到极大改善。
(3)本发明通过在检测窗口上部设置渗水孔、微流管道与注水仓配合,向待检测区域输送检测辅助液使其形成均匀的待测土壤溶液区,此时待检测传感器阵列部旋转至检测窗口处并与湿润后的土壤接触,便能准确捕捉到溶解后的土壤成分浓度,以此确保检测数据反映真实土壤成分,以此解决不同湿度土壤中养分溶解不均的检测偏差,同时让检测装置可适配不同质地、不同湿度的苎麻种植地块,相比仅能在特定湿度条件下使用的检测设备,气适用范围更广,同时检测传感器阵列部分区域交替布局,单次检测即可获取同一深度pH值、有机质及氮磷钾数据,避免多种参数相互干扰,提升装置检测数据的全面性和精准性。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
图1为本发明的整体结构示意图;
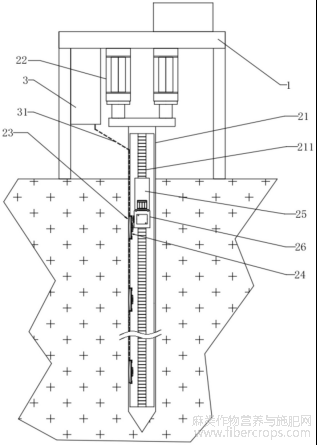
图1
图2为本发明的检测窗口局部放大结构示意图,转动块未与遮挡基板磁吸连接;
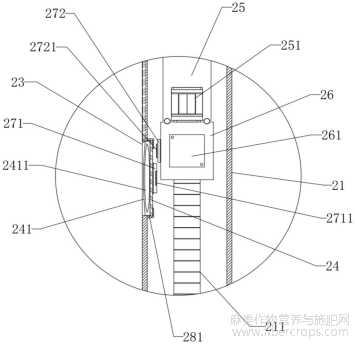
图2
图3为本发明的检测窗口局部放大结构示意图,转动块已与遮挡基板磁吸连接;
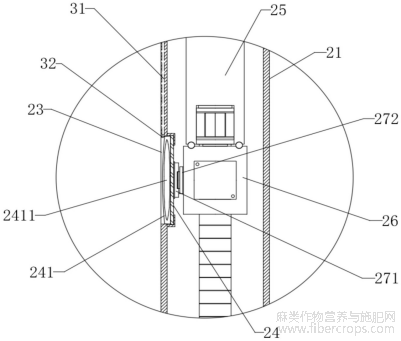
图3
图4为本发明的检测窗口与遮挡基板的局部立体结构示意图;
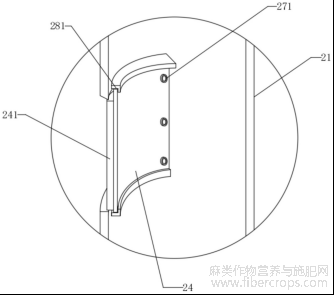
图4
图5为本发明的导向探管内部俯视结构示意图;
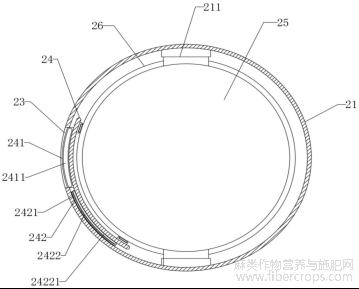
图5
图6为本发明的图5中的遮挡基板与检测窗口的放大结构示意图。
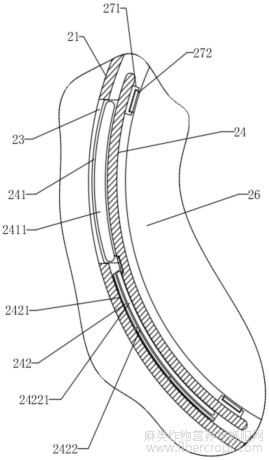
图6
在上述附图中,其附图标记所代表的为:1、基座;21、导向探管;211、电动滑轨;22、推动机构;23、检测窗口;24、遮挡基板;241、柔性遮挡部;2411、气囊挤压层;242、检测传感器阵列部;2421、检测区域;2422、弹性膨胀层;24221、气囊夹层;25、移动杆;251、转动电机;26、转动块;261、蓄电模块;271、磁性吸附块;2711、插接槽;272、磁吸连接块;2721、磁吸插头;281、转动卡槽;3、注水仓;31、微流管道;32、渗水孔。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定,以下所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
在以下描述中,为了提供对本发明的透彻理解阐述了大量特定细节。然而,对于本领域普通技术人员显而易见的是:不必采用这些特定细节来实行本发明。在其他实施例中,为了避免混淆本发明,未具体描述公知的结构、材料或方法。以下实施例中所使用的材料、仪器和试剂等,如无特殊说明,均可从商业途径得到。实施例中所使用的技术手段,如无特殊说明,均为本领域技术人员所熟知的常规手段。
此外,术语“第一”“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
实施例1:
请参阅图1至图2所示,本实施例公开了一种苎麻种植用土壤成分检测装置,所述检测装置包括基座1,所述基座1通过四周的支撑柱设置于待测地面上,其特征在于,所述基座1的下部设有分层检测机构,所述分层检测机构包括检测杆,所述检测杆包括竖直设置的导向探管21,所述导向探管21的顶端通过推动机构22与所述基座1相连接;
所述导向探管21的外部开设有多个检测窗口23,在所述导向探管21的内壁对应检测窗口23位置处贴设有遮挡基板24,所述遮挡基板24与所述导向探管转动配合,在所述遮挡基板24的外表面分别设有与检测窗口23相配合的柔性遮挡部241和检测传感器阵列部242;
初始时,所述遮挡基板24通过外表面的柔性遮挡部241对所述检测窗口23进行遮挡;
所述导向探管21的内部还设有移动杆25,所述移动杆25与所述导向探管21滑动配合,在所述移动杆25的底端还设有转动驱动件,所述转动驱动件的外侧表面与遮挡基板24的内表面之间设有相适配的磁性吸附部,当转动驱动件在移动杆25的带动下竖直移动至遮挡基板24所处位置时,通过所述磁性吸附部的相互吸合,使转动驱动件与遮挡基板24形成磁吸连接;
此时转动驱动件旋转后带动遮挡基板24旋转使检测传感器阵列部242转动至检测窗口23位置处。
显然地,在现有技术中,苎麻种植土壤检测多依赖传统取样法或简易探头,其往往存在分层数据失真与设备易损问题,并且传统方法需多次取样导致土壤结构破坏,且便携探头虽能现场检测但无法实现精准分层,传感器长期暴露易受土壤侵蚀损坏,同时探杆反复插拔造成土壤板结,传感器窗口被泥浆堵塞导致数据异常,最终影响施肥决策准确性;
为了解决上述问题,实现单次插入条件下的多深度检测与传感器动态防护,申请人通过对现有探杆结构进行发现,发现现有探杆外部大多都是将传感器直接进行裸露安装,虽然部分存在安装于探杆外部的检测窗口23中的,但其检测窗口23也是裸露,因此其存在土壤侵入风险,而目前的机械联动封闭机构易受土壤阻力影响,因此本申请,特利用可旋转遮挡基板24与磁吸驱动相结合的方案,在探杆内部构建动态启闭的检测窗口23,既实现传感器保护又确保分层检测精度。
具体而言,本实施例通过在基座1的下部设置分层检测机构,利用导向探管21外部分布的多个检测窗口23及推动机构22,其在对土壤成分进行检测时,通过推动机构22驱动导向探管21竖直插入土壤,使检测窗口23对应分布于不同深度的土壤中,进而无需像传统“取样?处理?检测”流程那样挖掘土壤样品,从而避免了取样后预处理导致不同深度土壤混合的问题,解决了传统检测丢失土壤自然分层特性、仅能获取整体平均含量的缺陷,实现了土壤分层数据结构的原位保留;
使得检测装置在检测土壤成分时可通过多个检测窗口23精准匹配苎麻种植生长时其不同根系分层深度(也即是检测过程中,移动杆25可连续对接不同深度的遮挡基板24,实现单次插管条件下的多层数据采集),以此有效区分采集深浅层土壤中的不同成分参数,并精准检测苎麻不同根系分层所对应的土壤养分数据,从而使检测装置的土壤检测数据能更为准确,并可靠应用在苎麻种植管理中,同时,无需像便携式检测设备那样多次插拔探头,在检测不同深度土壤时,通过单次插管完成多深度检测,避免了多次插拔对土壤的压实及对苎麻根系的扰动,并匹配苎麻“根系分层吸收”对检测精度的需求;
进一步而言,本申请通过在导向探管21内壁对应检测窗口23处设置带柔性遮挡部241与检测传感器阵列部242的遮挡基板24,且初始状态下由柔性遮挡部241对检测窗口23进行封闭遮挡,在检测过程中仅当转动驱动件移动至对应深度并通过磁性吸附部与遮挡基板24形成磁吸连接后,也即是转动驱动件与环状基本形成周向同步转动的联动配合结构,此时转动驱动件启动并绕自身轴线旋转,通过磁吸作用力带动遮挡基板24同步旋转,当遮挡基板24旋转至预设角度时,其外表面的检测传感器阵列部242恰好转动至与检测窗口23相对应的位置(此时柔性遮挡部241随遮挡基板24旋转脱离检测窗口23),从而使检测传感器阵列部242通过检测窗口23与外部土壤接触,从而避免了检测传感器在非检测阶段(如导向探头插入土壤过程中)与土壤或外界环境接触,使传感器阵列在非工作状态完全封闭,避免土壤颗粒附着导致的检测误差,同时避免泥土砂砾对检测传感器造成损坏,进而有效检测传感器使用寿命,同时检测传感器阵列部242直接与对应深度土壤接触检测,能精准获取该深度土壤的土壤成分参数,进而实现了检测设备对苎麻种植的土壤成分进行精准检测,为苎麻精细化种植管理提供可靠的技术支撑,并有效提升苎麻纤维品质与产量。
应能理解的,在本实施例中,推动机构22是指用于驱动导向探管21沿竖直方向升降,实现导向探管21插入土壤至目标检测深度或从土壤中拔出复位的线性驱动机构,其优选为液压油缸,导向探管21是指中空管状结构,且优选可以采用分段式不锈钢管拼接实现;检测窗口23是指沿管体轴向等距分布的矩形开口,具体可以采用激光切割工艺成型,开口长度可为5?8厘米,其间距根据苎麻根系分布特征设定,确保覆盖主吸收层;遮挡基板24优选为弧形金属薄板,其通过与导向探管21内壁形成转动副,可使遮挡基板24在旋转过程中保持稳定接触,避免土壤颗粒进入探管内部。
在一些可选地实施例中,如图2、图3和图5中所示,所述导向探管21与移动杆25之间通过滑轨模组滑动连接,所述滑轨模组包括沿导向探管21的轴向方向布设在其内部的电动滑轨211和设于移动杆25外部并与电动滑轨211滑动配合的滑块。
在本实施例中,通过电动滑轨211和滑块的配合,实现检测时电动滑轨211可驱动滑块沿滑轨轨迹稳定移动,进而带动移动杆25及底端的转动驱动件精准调整竖直位置,从而保证移动杆25在导向探管21内的精准可控位移,以使移动杆25能根据检测需求准确移动至对应检测窗口23位置处。
显然地,电动滑轨211是指沿导向探管21长度方向连续延伸的线性驱动轨道,具体可以采用内置步进电机与滚珠丝杠的集成式轨道结构来实现,其通过电信号控制移动杆25的位移量;而滑块是指与电动滑轨211形成滑动配合的机械部件,具体可以采用带有自润滑涂层的铝合金滑块与轨道凹槽嵌合结构来实现,其通过减少接触面摩擦系数提升滑动稳定性。
因此可以理解,本申请实现了移动杆25在导向探管21内部的高精度定位,确保转动驱动件与遮挡基板24在目标深度位置的准确对接,从而保障分层检测过程中传感器阵列与检测窗口23的空间匹配度,最终提升土壤成分分层数据的可靠性。
在一些可选地实施例中,如图2和图3所示,所述转动驱动件包括与外部与遮挡基板24相适配的转动块26,所述转动块26的上部与所述移动杆25底端转动连接,且在所述移动杆25的底端内部设有输出端与所述转动块26相连接的转动电机251。
本实施例中,转动块26与遮挡基板24外形适配以保证贴合度,而其上部与移动杆25底端转动连接,同时移动杆25底端内部的转动电机251输出端直接与转动块26相连,以此在检测时,当移动杆25带动转动块26竖直移动至目标深度的遮挡基板24处并通过磁性吸附部吸合后,转动电机251可启动并直接驱动转动块26旋转,进而带动遮挡基板24同步转动,实现检测传感器阵列部242与检测窗口23的精准对准。
其中,转动块26是指与遮挡基板24内表面形状匹配的刚性构件,其周向边缘轮廓与遮挡基板24接触面一致,确保磁吸时形成稳定的周向联动;转动电机251优选采用防水型步进电机来实现,其输出轴通过联轴器与转动块26同轴连接,直接传递旋转动力。
在一些优选地实施例中,如图2至图4所示,所述遮挡基板24与所述导向探管21内壁之间设有旋转结构,所述旋转结构包括与导向探管的内壁曲面相贴合并分别位于检测窗口23上部和下部的转动卡槽281,两个所述转动卡槽281的长度大于所述遮挡基板24的长度,且两个所述转动卡槽281之间的宽度不小于所述遮挡基板24的宽度;
所述遮挡基板24嵌设于两个所述转动卡槽281之间并与所述转动卡槽281滑动配合。
其中,对于转动卡槽281,其是指沿导向探管内壁曲面延伸的环形凹槽结构,具体可以采用铝合金材质加工成型,其上下两排凹槽间距略大于遮挡基板24厚度,用于形成滑动轨道约束遮挡基板24的旋转路径;而滑块是指设置在遮挡基板24四角的凸起结构,优选采用聚四氟乙烯材料制作,其截面尺寸与转动卡槽281内腔相匹配,能够在卡槽内低阻力滑动,用于限制遮挡基板24径向偏移。
可以明确地,本实施例中旋转结构采用转动卡槽281的结构设置,其通过在导向探管21内壁对应检测窗口23的上部与下部,分别设置与探管内壁曲面相贴合的转动卡槽281,以及在两个转动卡槽281之间嵌设遮挡基板24,并通过遮挡基板24与转动卡槽281形成滑动配合,使遮挡基板24可沿转动卡槽281的轨迹稳定活动,其解决了遮挡基板24旋转定位不准的问题,使遮挡基板24旋转时始终沿固定轨迹运动,确保检测传感器阵列部242能精准对接检测窗口23,避免因错位导致检测数据失真,完美适配苎麻土壤分层检测对土壤深度精准对应的需求;同时在一定程度上增强了检测窗口23的初始密封性,通过转动卡槽281与遮挡基板24的嵌合结构能减少二者间的间隙,防止探管插入土壤时泥土从缝隙渗入探管内部,进而保护移动杆25、转动驱动件等核心部件不受土壤颗粒污染,并利用滑块与卡槽的滑动配合替代了遮挡基板24与探管内壁的直接摩擦,减少部件磨损,延长遮挡基板24的使用寿命,确保装置可多次用于不同苎麻种植地块的检测,维持稳定的分层检测性能。
示例而言,在初始状态下,遮挡基板24卡嵌在转动卡槽281内,外表面的柔性遮挡部241恰好对检测窗口23形成封闭遮挡,此时转动卡槽281通过尺寸适配性限制遮挡基板24的横向位移,避免其因土壤挤压或探管插入震动发生偏移;当转动驱动件在移动杆25带动下与遮挡基板24磁吸连接后,转动驱动件旋转时会带动遮挡基板24同步活动,此时遮挡基板24会沿转动卡槽281的内壁轨迹滑动,转动卡槽281一方面为遮挡基板24提供稳定的旋转导向路径,防止其旋转过程中出现倾斜或错位,另一方面通过长度大于遮挡基板24的设计为遮挡基板24预留足够旋转空间,确保遮挡基板24能完整旋转至检测传感器阵列部242对准检测窗口23的预设角度,同时宽度不小于遮挡基板24的设计则有效保证遮挡基板24旋转时不会因卡槽束缚产生卡顿,其有效消除了遮挡基板24旋转过程中的轴向偏移和径向卡滞现象,确保检测传感器阵列部242能够精确对准检测窗口23,且使遮挡基板24在土壤阻力变化时仍能保持稳定旋转轨迹,避免因机械振动导致的传感器错位,从而进一步提升检测数据可靠性。
在一些优选地实施例中,请参阅图3、图5和图6,所述磁性吸附部包括相互磁吸配合的磁性吸附块271和磁吸连接块272,所述磁性吸附块271固定连接于所述遮挡基板24的内表面,所述磁性吸附块的表面向内凹陷形成插接槽2711,所述插接槽2711内设有第一导电接触片,所述第一导电接触片与所述检测传感器阵列部242之间电性连接,所述磁吸连接块272安装于转动块26的外部,且在所述磁吸连接块272对应磁性吸附块271的端部设有弹性伸缩的磁吸插头2721,所述磁吸插头2721于所述插接槽2711相适配,且所述磁吸插头的端部连接有第二导电接触片,所述第二导电接触片与嵌设于转动块26内部的蓄电模块261电性连接。
从而在磁性吸附块271与磁吸连接块272磁吸配合时,磁吸插头2721在磁吸力作用下插入至插接槽2711中,使第一导电接触片与第二导电接触片接触连接,以此使蓄电模块261对检测传感器阵列部242供电。
需要说明的是,本实施例中磁性吸附部通过设置相互磁吸配合的磁性吸附块271与磁吸连接块272,且在磁性吸附块271表面开设带第一导电接触片的插接槽2711,在磁吸连接块272端部设置带第二导电接触片的弹性伸缩磁吸插头2721,其巧妙地构建了磁吸导电一体化结构,具体而言,其在检测过程中,当移动杆25带动转动驱动件竖直移动至目标深度的遮挡基板24位置时,先通过磁性吸附块271与磁吸连接块272的磁吸力实现二者快速精准对接,以此形成转动驱动件与遮挡基板24的周向联动结构,随后磁吸插头2721在磁吸力作用下弹性伸出并插入插接槽2711,使第一导电接触片与第二导电接触片紧密接触,既完成转动驱动件对遮挡基板24的旋转动力传递适配,又同步导通蓄电模块261向检测传感器阵列部242的供电回路,实现了磁吸对接即供电的同步动作,从而无需额外手动接线或启动供电开关,既避免了传统检测中供电线路拉扯中断的问题,又确保了检测传感器阵列部242在对应深度检测时的稳定供电,同时磁吸连接的可靠性也保障了转动驱动件带动遮挡基板24旋转时的同步性,让检测传感器阵列部242能精准转动至检测窗口23位置,有效提升了分层检测的效率与数据准确性。
可以理解的,磁性吸附块271是指具有磁性吸附能力的块状结构,优选采用永磁体或电磁体实现,其是阵列分布于遮挡基板24的内表面的,而磁吸连接块272是指能磁性吸附块271进行磁性吸引的金属块状结构,其同样设有多个,并周向分布于转动块26的四周,以此在转动块26与遮挡基板24处于同一水平高度位置时,只要其任一个磁吸连接块272与磁性吸附块271之间形成磁性吸附,就可以实现转动块26与遮挡基板24形成磁性连接,以此实现转动块26在靠近磁性吸附块271时通过磁吸力可与遮挡基板24之间进行快速定位连接;而磁吸插头2721是指具有弹性伸缩功能的导电部件,具体可以采用弹簧加载的金属插头实现,第一导电接触片和第二导电接触片是指用于传导电流的金属片,优选采用铜合金镀金材料实现,用于在插接槽2711与磁吸插头2721对接时建立电性连接通路,蓄电模块261是指集成于转动块26内部的供电单元,优选可采用微型锂电池组实现,用于为检测传感器阵列部242提供电能。
显然地,较于现有技术来说,传统方案通常采用外置导线或固定式触点供电,导线易受土壤摩擦损坏,固定触点易因震动导致接触不良,而本申请通过磁吸插头2721与插接槽2711的插接式导电结构,在实现供电通路自动连接的同时,避免了外置导线的缠绕与磨损问题,此外,现有技术中传感器常处于持续通电状态,而本方案仅在检测窗口23开启时激活供电,进一步降低传感器因潮湿环境导致的氧化风险;因此本申请实现了检测传感器阵列部242在非工作状态下的物理封闭与断电保护,有效防止土壤颗粒侵入或湿气锈蚀。
在进一步优选地实施例中,如图6所示,所述检测传感器阵列部242包括呈矩形状分布于所述遮挡基板24的外表面并沿周向依次划分的多个检测区域2421,多个所述检测区域2421相互间隔设置并分别对应设有土壤pH值传感器、有机质检测传感器与氮磷钾离子传感器,所述检测传感器阵列部242的内部还嵌设有弹性膨胀层2422,且所述弹性膨胀层2422相背于遮挡基板24的一侧分别与对应的各检测区域2421相连接,在所述弹性膨胀层2422内部还设有气腔夹层;
所述柔性遮挡部241凸出于遮挡基板24外表面设置,在所述柔性遮挡部241的内部嵌设有密封的气囊挤压层2411,所述气囊挤压层2411内填充有气体介质,且所述气囊挤压层2411与气腔夹层之间通过开设于遮挡基板24内部的微型气道连通。
具体来说,本实施例中,矩形分布的检测传感器阵列部242被周向划分为多个独立检测区域2421,并且每个区域配置单一类型传感器,也即是土壤pH值传感器、有机质检测传感器与氮磷钾离子传感器分别安装于不同检测区域2421,而当遮挡基板24旋转时,通过柔性遮挡部241使当前检测区域2421通过检测窗口23暴露至土壤中,也即是当遮挡基板24旋转至检测窗口23时,对应检测区域2421的传感器接触土壤进行检测,当检测完成后,遮挡基板24再反向旋转复位,柔性遮挡部241重新封闭检测窗口23,防止土壤侵入。
相较于现有技术,本方案通过多个检测区域2421矩形分布,并且检测区域2421通过各类型传感器检测土壤成分,其既降低了传感器受损概率,又实现多参数独立检测;同时其对应苎麻根部不同深度所处的各检测区域2421可按照检测需求逐步与检测窗口23对齐并接触土壤,进而实现对不同深度层的土壤多种成分参数的连续采集,避免多次插拔探头造成的土壤扰动,其实现了对苎麻生长关键土壤指标(pH值、有机质、氮磷钾)的全面检测,使其精准匹配苎麻浅层须根需速效养分、深层主根需稳定营养的分层吸收需求。
显然地,当遮挡基板24绕导向探管21内壁旋转,使柔性遮挡部241脱离检测窗口23时,凸出的柔性遮挡部241的与导向探管21内壁之间会形成挤压配合,以促使气囊挤压层2411内的气体介质经微型气道流入弹性膨胀层2422的气腔夹层,进而驱动弹性膨胀层2422沿导向探管21径向向外膨胀凸出,以此带动检测传感器阵列部242的各类型传感器的探头穿过检测窗口23靠近并接触土壤,从而实现对土壤的有效接触检测,从而实现在单次操作中即可精准同步获取同一土壤深度的pH值、有机质及氮磷钾含量数据。
进一步而言,其遮挡基板24的具体过程如下:
初始状态:遮挡基板24通过转动卡槽281定位,柔性遮挡部241凸出端朝向导向探管21内壁,气囊挤压层2411处于自然舒张状态,弹性伸缩层未膨胀,检测传感器阵列部242的探头完全贴合遮挡基板24外表面,与检测窗口23内侧平齐(无外伸,避免导向探管21插入土壤时受损);
检测触发过程:当转动驱动件通过磁性吸附部带动遮挡基板24旋转时,柔性遮挡部241随遮挡基板24同步转动,其凸出部分逐渐与导向探管21内壁接触并受挤压,气囊挤压层2411内的气体介质(如氮气)经微型气道单向阀流入弹性伸缩层的气腔夹层,气腔夹层压力升高推动弹性伸缩层沿径向向外膨胀(使传感器探头穿出检测窗口23与土壤形成接触);
复位过程:当前深度检测完成后,转动驱动件带动遮挡基板24反向旋转,此时柔性遮挡部241脱离导向探管21内壁挤压,而气腔夹层则与导向探管21内壁挤压配合,进而将气腔夹层内的气体经微型流道反向顶回气囊挤压层2411使柔性遮挡部241重新凸出封堵检测窗口23,而此时弹性伸缩层恢复初始厚度,传感器探头收回至遮挡基板24表面。
在一些可选地实施例中,所述基座1的上部还设有控制端,所述控制端包括检测数据处理模块,所述检测数据处理模块与所述检测传感器阵列部242信号连接,用于接收其传输而至的土壤检测数据并发送至外界终端。
本实施例中,控制端通过其搭载的检测数据处理模块可与检测传感器阵列部242实时建立信号连接,高效接收并整合各深度检测窗口23传来的土壤pH值、有机质及氮磷钾分层数据进行处理并生成检测结果后发送至外界终端,以便于种植人员快速获取当前苎麻种植土壤成分数据,从而针对施肥管理。
可以理解的,控制端是指集成于基座1上部的数据管理单元,优选采用嵌入式工控机或微处理器来实现,其内置的通信接口与检测传感器阵列部242建立物理连接或无线连接,控制端是指集成于基座1上部的数据管理单元,优选可以采用嵌入式工控机或微处理器来实现,其内置的通信接口与检测传感器阵列部242建立物理连接或无线连接。
实施例2:
基于实施例1,本实施例在此提出一种优选地实施例,在图1和3中已示出,具体为:在位于所述检测窗口23的内框上部开设有渗水孔32,所述渗水孔32的出水端向下设置并沿远离检测窗口23的方向倾斜设置,且所述渗水孔32的进水端通过穿设于导向探管21内的微流管道31与注水仓3相连通,所述注水仓3连接于所述基座1。
需要说明的是,由于土壤中养分(如氮磷钾离子、可溶性有机质)均是易溶于水的特性,若仅依靠检测传感器阵列部242直接与土壤接触检测,会因田间土壤湿度存在差异(如干旱地块土壤含水量低、黏性土壤水分分布不均),导致土壤中的可溶性养分无法充分溶解到传感器可捕捉的介质中,比如干燥土壤中,氮磷钾离子多以固态形式吸附在土壤颗粒表面,传感器难以有效接触并识别,易出现检测数据偏低或数值波动大的问题;而即使在湿润土壤中,检测窗口23处土壤也可能因导向探管21插入时的挤压形成局部板结,水分无法顺畅渗透至传感器接触区域,同样造成土壤成分数据检测不准确,进而影响检测装置使用效果。
因此,本实施例通过在检测窗口23内框上部开设多个渗水孔32,且将渗水孔32出水端向下倾斜远离检测窗口23设置,并通过微流管道31连接基座1上的注水仓3,其在检测开始时,注水仓3可通过微流管道31向渗水孔32输送少量、精准剂量的检测辅助液,以使检测辅助液经倾斜的渗水孔32缓慢流出后,会先湿润检测窗口23周边的土壤区域,使该区域土壤中的可溶性成分充分溶解到水中,形成均匀的待测土壤溶液区,此时待检测传感器阵列部242旋转至检测窗口23处并与湿润后的土壤接触,便能准确捕捉到溶解后的土壤成分浓度,以此确保检测数据反映真实土壤成分,避免出现检测偏差,同时让检测装置可适配不同质地、不同湿度的苎麻种植地块,相比仅能在特定湿度条件下使用的检测设备,气适用范围更广。
同时相较于现有技术,本实施例通过渗水孔32倾斜导向与微流管道31流速控制,使液体以可控速率沿特定方向扩散,既维持了土壤原有结构完整性,又确保溶液在目标深度层内均匀分布,有效消除因液体分布不均引起的检测误差。
因此可以明确地,本申请解决了传感器直接接触土壤时因杂质附着导致的检测数据出现偏差失真问题,且倾斜渗水孔32设计可有效引导检测辅助液沿远离检测窗口23边缘渗出,避免液体冲刷造成各传感器物理损伤,进而通过微流管道31与渗水孔32的协同作用使检测辅助液在目标土壤层内形成厚度均匀的湿润带,为传感器提供标准化的检测环境,从而显著提升检测装置对土壤成分检测数据的准确性与可靠性,并改善检测装置使用效果。
其中,在上述实施例中,渗水孔32优选采用孔径为0.5?1mm的锥形孔道来实现,其出水端向下倾斜15?30°,该倾斜角度设计使液体流出方向与检测窗口23平面形成夹角;而微流管道31是指内径为1?2mm的柔性导管,穿设于导向探管21管壁内部,用于建立注水仓3与渗水孔32之间的密封液体通道,检测辅助液优选为适配苎麻土壤检测需求、且不干扰养分参数检测的功能性液体,例如去离子水。
实施例3:
本实施例基于上述实施例1和实施例2所提出的一种苎麻种植用土壤成分检测装置,特在此提出种苎麻种植用土壤成分检测方法,而该方法包括如下步骤:
步骤1,装置部署:将基座1通过四周的支撑柱固定于待测地面,检查并确认初始状态下,遮挡基板24外表面的柔性遮挡部241对导向探管21上所有检测窗口23形成封闭遮挡;步骤2,导向探管21插入:根据苎麻种植地待测土壤的目标深度范围,通过推动机构22驱动导向探管21竖直下移,使导向探管21插入土壤,直至导向探管21插入土壤的深度覆盖目标检测层,并确保检测窗口23与待检测土层深度位置相对应;步骤3,磁吸对接;通过电动滑轨211和滑块控制移动杆25在导向探管21内下滑,以带动转动驱动件移动至目标检测深度对应的遮挡基板24位置,通过磁性吸附部的磁吸配合使转动块26与遮挡基板24形成周向联动,同时磁吸插头2721插入插接槽2711内,使第一导电接触片与第二导电接触片连接导通,蓄电模块261为检测传感器阵列部242供电;步骤4,检测启动:通过注水仓3与微流管道31向对应检测区域2421的渗水孔32注入预设量的检测辅助液,进而使渗水孔32将检测辅助液缓慢均匀的渗入检测窗口23四周的土壤中,从而使待测区域的土壤形成待测土壤溶液区,此时,控制转动电机251使其驱动转动块26旋转,通过转动块26与遮挡基板24的磁吸联动作用,带动遮挡基板24沿导向探管21内壁的转动卡槽281滑动旋转并逐渐远离检测窗口23,直至检测传感器阵列部242的检测区域2421与检测窗口23相对应;步骤5,土壤参数数据采集:在柔性遮挡部241逐渐旋转远离检测窗口23时,柔性遮挡部241的气囊挤压层2411与导向探管21内壁挤压,以使气囊挤压层2411内的气体介质进入至气腔夹层中,并使弹性膨胀层2422进行弹性膨胀,实现检测区域2421通过检测窗口23向外凸出,并通过转动块26的旋转,以使多个检测区域2421的土壤pH值传感器、有机质检测传感器与氮磷钾离子传感器的探头部分别与当前深度的待测土壤溶液区进行对应接触,从而对土壤成分参数进行依次数据采集并传输至检测数据处理模块,检测数据处理模块接收数据并处理后发送至外界终端;步骤6,分层检测:完成当前目标深度的土壤参数数据采集后,执行以下操作以实现对多个深度的分层检测:若待测土壤深度分层高度与检测窗口23间距一致,保持导向探管21位置不变,通过滑轨模组驱动移动杆25下滑,带动转动驱动件依次对接导向探管21上其他检测窗口23内的遮挡基板24,重复步骤3?5完成对应深度检测;若待测土壤深度分层高度与检测窗口23间距不一致,通过推动机构22微调导向探管21竖直位置,使目标深度与某一检测窗口23相对应,再通过滑轨模组驱动移动杆25对接该检测窗口23的遮挡基板24,重复步骤3?5完成目标深度检测;步骤7,检测复位:所有深度检测完成后,通过转动驱动件驱动遮挡基板24旋转回初始位置封闭检测窗口23,控制移动杆25上移使转动驱动件脱离遮挡基板24,同时启动推动机构22拔出导向探管21。
相较于现有技术,传统方法需多次插拔探头导致土壤压实,而本实施例所提出的检测方法通过单次插入导向探管21实现多深度检测,消除重复操作对土壤结构的破坏,并且针对现有手持探头直接暴露传感器易受损,本方法通过旋转式遮挡基板24形成物理保护,仅在检测时短暂暴露传感器阵列,有效确保传感器不受外界环境影响而损坏,同时本方法通过独立检测窗口23保持土壤自然分层状态,确保数据准确性,以此高效衔接苎麻不同根系层养分需求与种植决策,大幅提升检测效率与精准度,为苎麻精准施肥、科学种植提供可靠数据支撑。
需要注意的是,本说明书所附图式所绘示的结构、比例、大小等,均为示意图,其仅作用于配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等方位用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
文章摘自国家发明专利,一种苎麻种植用土壤成分检测装置及方法,发明人:崔忠刚,张中华,杨燕,李萍,苟云,申请号:202511685676.3,申请日:2025.11.18
