摘 要:本发明涉及一种双螺杆夹麻器转角搬运机械装置,它属于夹麻器技术领域。本发明包括箱体、拉摆臂机构、推摆臂机构、旋转翻转机构和机械手夹爪,拉摆臂机构、推摆臂机构均与箱体连接,旋转翻转机构安装在箱体上,拉摆臂机构中拉摆臂气缸前固定座与箱体连接,拉摆臂与拉摆臂气缸前固定座相连,拉摆臂一端通过拉块安装块与夹麻器拉块相连,拉摆臂另一端与拉摆臂气缸相连;推摆臂机构中推摆臂通过随动组件与摆臂安装块相连,摆臂安装块固定在箱体上,推摆臂的下端通过气缸活塞杆连接块与推摆臂气缸相连;机械手夹爪与旋转翻转机构中的轴套组件、齿轮轴相连。本发明结构设计安全合理,稳定可靠,搬运效率高,传动平稳,承载能力较强的,满足使用需求。
权利要求书
1 .双螺杆夹麻器转角搬运机械装置,包括箱体(1),其特征在于:还包括拉摆臂机构(2)、推摆臂机构(3)、旋转翻转机构(5)和机械手夹爪(6),所述拉摆臂机构(2)、推摆臂机构(3)均与箱体(1)连接,旋转翻转机构(5)安装在箱体(1)上,拉摆臂机构(2)包括拉摆臂(21)、拉摆臂气缸前固定座(22)、拉摆臂气缸(23)、拉块安装块(24)和夹麻器拉块(25),该拉摆臂气缸前固定座(22)与箱体(1)连接,拉摆臂(21)与拉摆臂气缸前固定座(22)相连,拉摆臂(21)的一端通过拉块安装块(24)与夹麻器拉块(25)相连,该拉摆臂(21)的另一端与拉摆臂气缸(23)相连;推摆臂机构(3)包括推摆臂(31)、随动组件(32)、摆臂安装块(33)、气缸活塞杆连接块(34)和推摆臂气缸(35),该推摆臂(31)通过随动组件(32)与摆臂安装块(33)相连,摆臂安装块(33)固定在箱体(1)上,推摆臂(31)的下端通过气缸活塞杆连接块(34)与推摆臂气缸(35)相连;旋转翻转机构(5)包括轴套组件(51)、轴套底座(52)、旋转机构底座(53)、气缸活塞杆连接座(54)、旋转翻转气缸(55)、旋转翻转气缸安装座(56)、旋转轴(57)、圆锥齿轮一(58)、圆锥齿轮二(59)和齿轮轴(60),该轴套组件(51)设置在旋转轴(57)的外部,轴套组件(51)的一端与齿轮轴(60)相连,轴套组件(51)的另一端与轴套底座(52)相配合,旋转翻转气缸(55)通过气缸活塞杆连接座(54)与轴套底座(52)连接,轴套底座(52)固定在旋转机构底座(53)上,旋转翻转气缸(55)固定在旋转翻转气缸安装座(56)上,旋转轴(57)的上部与圆锥齿轮一(58)相连,该旋转轴(57)的下部与旋转机构底座(53)连接,齿轮轴(60)上设置有圆锥齿轮二(59),圆锥齿轮一(58)与圆锥齿轮二(59)相互啮合;机械手夹爪(6)与旋转翻转机构(5)中的轴套组件(51)、齿轮轴(60)相连。
2.根据权利要求1所述的双螺杆夹麻器转角搬运机械装置,其特征在于:还包括检测机构(4),所述检测机构(4)固定在箱体(1)上,该检测机构(4)包括接近传感器(41)和接近传感器安装座(42),接近传感器(41)设置在接近传感器安装座(42)上。
3.根据权利要求1所述的双螺杆夹麻器转角搬运机械装置,其特征在于:所述机械手夹爪(6)包括爪子安装座(61)和多个爪子(62),机械手夹爪(6)与齿轮轴(60)相连,多个爪子(62)均安装在爪子安装座(61)上。
4.根据权利要求3所述的双螺杆夹麻器转角搬运机械装置,其特征在于:所述机械手夹爪(6)还包括缓冲块(63)和定位拨片(64),缓冲块(63)与爪子安装座(61)相连,定位拨片(64)安装在爪子安装座(61)的底部。
5.根据权利要求2所述的双螺杆夹麻器转角搬运机械装置,其特征在于:所述接近传感器安装座(42)包括传感器安装座底板(421)、连接管(422)、顶块(423)和接近传感器安装支架(424),连接管(422)的一端与传感器安装座底板(421)连接,该连接管(422)的另一端与顶块(423)连接,接近传感器安装支架(424)与顶块(423)固定。
6.根据权利要求1所述的双螺杆夹麻器转角搬运机械装置,其特征在于:还包括罩壳(7),所述圆锥齿轮一(58)、圆锥齿轮二(59)的外部设置有罩壳(7)。
7 .根据权利要求1所述的双螺杆夹麻器转角搬运机械装置,其特征在于:还包括固定环(9)和多个衬套(8),所述固定环(9)和多个衬套(8)均设置在齿轮轴(60)上。
8.根据权利要求1所述的双螺杆夹麻器转角搬运机械装置,其特征在于:还包括限位座一(11)、限位座二(12)和限位块(13),所述限位块(13)安装轴套底座(52)侧面,限位座一(11)、限位座二(12)分别设置在旋转机构底座(53)的两侧。
9.根据权利要求8所述的双螺杆夹麻器转角搬运机械装置,其特征在于:所述限位座(11)与限位座二(12)结构完全相同,该限位座一(11)、限位座二(12)均包括底板(111)、加强筋(112)和支撑板(113),支撑板(113)固定在底板(111)上,加强筋(112)与底板(111)、支撑板(113)连接。
技术领域
本发明涉及一种机械装置,尤其是涉及一种双螺杆夹麻器转角搬运机械装置,它属于夹麻器技术领域。
背景技术
双螺杆夹麻器是一种用于物料搬运和处理的机械设备,它通常由两个相互啮合的螺杆组成,通过旋转运动来实现物料的输送和混合。
目前,双螺杆夹麻器转角搬运结构,存在如下缺陷:由于双螺杆夹麻器的混合强度较大,当某些物料的密度和比重差距较大时,容易产生偏向现象;这意味着物料在搬运过程中可能会向一侧偏移,导致混合不均匀,影响最终产品的质量;另外,在混合过程中,双螺杆夹麻器会产生较大的噪音,以及整个装置,投资成本高。
因此,提供一种结构设计合理,搬运效率高,成本低,改善噪音的双螺杆夹麻器转角搬运机械装置,显得尤为必要。
发明内容
本发明的目的在于克服现有技术中存在的上述不足,而提供一种结构设计安全合理,稳定可靠,搬运效率高,传动平稳,承载能力较强的双螺杆夹麻器转角搬运机械装置。
本发明解决上述问题所采用的技术方案是:该双螺杆夹麻器转角搬运机械装置,包括箱体,其特征在于:还包括拉摆臂机构、推摆臂机构、旋转翻转机构和机械手夹爪,所述拉摆臂机构、推摆臂机构均与箱体连接,旋转翻转机构安装在箱体上,拉摆臂机构包括拉摆臂、拉摆臂气缸前固定座、拉摆臂气缸、拉块安装块和夹麻器拉块,该拉摆臂气缸前固定座与箱体连接,拉摆臂与拉摆臂气缸前固定座相连,拉摆臂的一端通过拉块安装块与夹麻器拉块相连,该拉摆臂的另一端与拉摆臂气缸相连;推摆臂机构包括推摆臂、随动组件、摆臂安装块、气缸活塞杆连接块和推摆臂气缸,该推摆臂通过随动组件与摆臂安装块相连,摆臂安装块固定在箱体上,推摆臂的下端通过气缸活塞杆连接块与推摆臂气缸相连;旋转翻转机构包括轴套组件、轴套底座、旋转机构底座、气缸活塞杆连接座、旋转翻转气缸、旋转翻转气缸安装座、旋转轴、圆锥齿轮一、圆锥齿轮二和齿轮轴,该轴套组件设置在旋转轴的外部,轴套组件的一端与齿轮轴相连,轴套组件的另一端与轴套底座相配合,旋转翻转气缸通过气缸活塞杆连接座与轴套底座连接,轴套底座固定在旋转机构底座上,旋转翻转气缸固定在旋转翻转气缸安装座上,旋转轴的上部与圆锥齿轮一相连,该旋转轴的下部与旋转机构底座连接,齿轮轴上设置有圆锥齿轮二,圆锥齿轮一与圆锥齿轮二相互啮合;机械手夹爪与旋转翻转机构中的轴套组件、齿轮轴相连。
作为优选,本发明还包括检测机构,所述检测机构固定在箱体上,该检测机构包括接近传感器和接近传感器安装座,接近传感器设置在接近传感器安装座上。
作为优选,本发明所述机械手夹爪包括爪子安装座和多个爪子,机械手夹爪与齿轮轴相连,多个爪子均安装在爪子安装座上。
作为优选,本发明所述机械手夹爪还包括缓冲块和定位拨片,缓冲块与爪子安装座相连,定位拨片安装在爪子安装座的底部。
作为优选,本发明所述接近传感器安装座包括传感器安装座底板、连接管、顶块和接近传感器安装支架,连接管的一端与传感器安装座底板连接,该连接管的另一端与顶块连接,接近传感器安装支架与顶块固定。
作为优选,本发明还包括罩壳,所述圆锥齿轮一、圆锥齿轮二的外部设置有罩壳。
作为优选,本发明还包括固定环和多个衬套,所述固定环和多个衬套均设置在齿轮轴上。
作为优选,本发明还包括限位座一、限位座二和限位块,所述限位块安装轴套底座侧面,限位座一、限位座二分别设置在旋转机构底座的两侧。
作为优选,本发明所述限位座一与限位座二结构完全相同,该限位座一、限位座二均包括底板、加强筋和支撑板,支撑板固定在底板上,加强筋与底板、支撑板连接。
本发明与现有技术相比,具有以下优点和效果:(1)整体结构设计安全合理,稳定可靠、牢固,经久耐用,拉、推夹麻器采用由气缸控制的摆臂机构,整体行程可适当调节,实用性较强;(2)在机械手夹爪中设计有定位拨片,确保夹麻器在搬运过程中固定牢固,不脱落;(3)在旋转翻转机构中,通过气缸的动作,同步实现机械夹爪顺时针90度旋转和90度翻转功能,通过两组限位结构进行行程控制,可做适当调节;翻转部分采用相交轴间传动的锥形齿轮机构,传动平稳,承载能力较强,满足使用需求。
附图说明
图1是本发明实施例双螺杆夹麻器转角搬运机械装置的应用场景示意图。
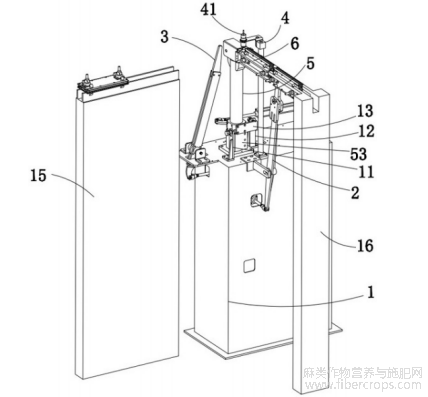
图1
图2是本发明实施例去除箱体后的结构示意图。
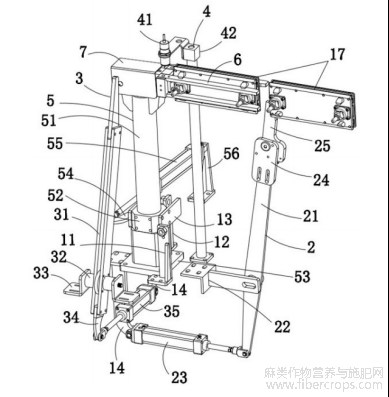
图2
图3是本发明实施例中旋转翻转机构与机械手夹爪的结构示意图。
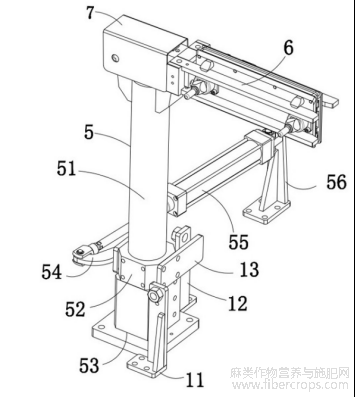
图3
图4是图3去除罩壳后的另一方向结构示意图。
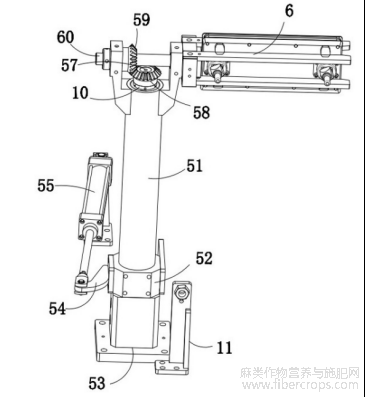
图4
图5是本发明实施例中机械手夹爪与齿轮轴配合的结构示意图。
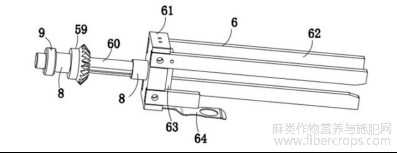
图5
图6是本发明实施例中接近传感器安装座的结构示意图。
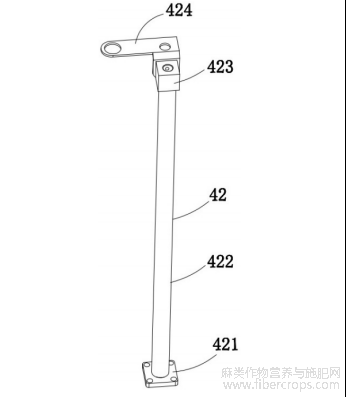
图6
图7是本发明实施例中限位座一(限位座二)的结构示意图。
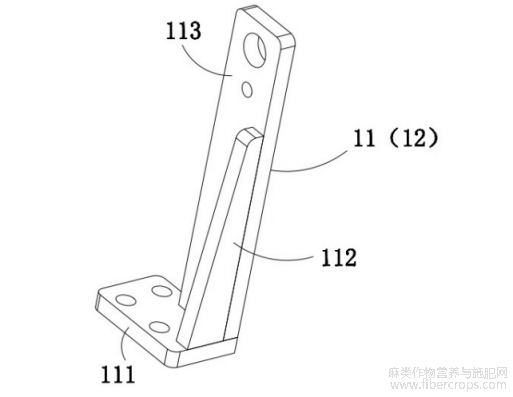
图7
图中:箱体1,拉摆臂机构2,推摆臂机构3,检测机构4,旋转翻转机构5,机械手夹爪6,罩壳7,衬套8,固定环9,挡圈10,限位座一11,限位座二12,限位块13,传感器支架14,导轨一15,导轨二16,双螺杆夹麻器17;
拉摆臂机构2:拉摆臂21,拉摆臂气缸前固定座22,拉摆臂气缸23,拉块安装块24,夹麻器拉块25;
推摆臂机构3:推摆臂31,随动组件32,摆臂安装块33,气缸活塞杆连接块34,推摆臂气缸35;
检测机构4:接近传感器41,接近传感器安装座42;
接近传感器安装座42:传感器安装座底板421,连接管422,顶块423,接近传感器安装支架424;
旋转翻转机构5:轴套组件51,轴套底座52,旋转机构底座53,气缸活塞杆连接座54,旋转翻转气缸55,旋转翻转气缸安装座56,旋转轴57,圆锥齿轮一58,圆锥齿轮二59,齿轮轴60;
机械手夹爪6:爪子安装座61,爪子62,缓冲块63,定位拨片64。
限位座一11:底板111,加强筋112,支撑板113。
具体实施方式
下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
实施例
参见图1至图7,本实施例双螺杆夹麻器转角搬运机械装置包括箱体1、拉摆臂机构2、推摆臂机构3、检测机构4、旋转翻转机构5和机械手夹爪6,拉摆臂机构2、推摆臂机构3均与箱体1连接,旋转翻转机构5安装在箱体1上。
本实施例中拉摆臂机构2包括拉摆臂21、拉摆臂气缸前固定座22、拉摆臂气缸23、拉块安装块24和夹麻器拉块25,拉摆臂气缸前固定座22与箱体1连接,拉摆臂21与拉摆臂气缸前固定座22相连,拉摆臂21的一端通过拉块安装块24与夹麻器拉块25相连,拉摆臂21的另一端与拉摆臂气缸23相连,拉摆臂气缸23的另一端通过传感器支架14与箱体1连接。
本实施例中推摆臂机构3包括推摆臂31、随动组件32、摆臂安装块33、气缸活塞杆连接块34和推摆臂气缸35,推摆臂31通过随动组件32与摆臂安装块33相连,摆臂安装块33固定在箱体1上,推摆臂31的下端通过气缸活塞杆连接块34与推摆臂气缸35相连,推摆臂气缸35的另一端通过传感器支架14与箱体1连接。
本实施例中旋转翻转机构5包括轴套组件51、轴套底座52、旋转机构底座53、气缸活塞杆连接座54、旋转翻转气缸55、旋转翻转气缸安装座56、旋转轴57、圆锥齿轮一58、圆锥齿轮二59和齿轮轴60,轴套组件51设置在旋转轴57的外部,轴套组件51的一端与齿轮轴60相连,轴套组件51的另一端与轴套底座52相配合。
本实施例中旋转翻转气缸55中的气缸活塞杆通过气缸活塞杆连接座54与轴套底座52连接,轴套底座52固定在旋转机构底座53上,旋转翻转气缸55固定在旋转翻转气缸安装座56上,旋转轴57的上部与圆锥齿轮一58相连,该旋转轴57的下部与旋转机构底座53连接,齿轮轴60上设置有圆锥齿轮二59,圆锥齿轮一58与圆锥齿轮二59相互啮合;本实施例中机械手夹爪6与旋转翻转机构5中的轴套组件51、齿轮轴60相连。
本实施例中检测机构4固定在箱体1上,检测机构4包括接近传感器41和接近传感器安装座42,接近传感器41设置在接近传感器安装座42上。
本实施例中机械手夹爪6包括爪子安装座61、缓冲块63、定位拨片64和多个爪子62,机械手夹爪6与齿轮轴60相连,多个爪子62均安装在爪子安装座61上;缓冲块63与爪子安装座61相连,定位拨片64安装在爪子安装座61的底部。
本实施例中接近传感器安装座42包括传感器安装座底板421、连接管422、顶块423和接近传感器安装支架424,连接管422的一端与传感器安装座底板421连接,该连接管422的另一端与顶块423连接,接近传感器安装支架424与顶块423固定。
本实施例中旋转轴57上部设置有轴承,圆锥齿轮一58与轴承之间设置有挡圈10,本实施例中圆锥齿轮一58、圆锥齿轮二59的外部设置有罩壳7。
本实施例中固定环9和多个衬套8均设置在齿轮轴60上。
本实施例设置两套限位结构(限位座一11、限位座二12),限位块13安装轴套底座52侧面,限位座一11、限位座二12分别设置在旋转机构底座53的两侧,本实施例中限位座一11与限位座二12结构完全相同,限位座一11、限位座二12均包括底板111、加强筋112和支撑板113,支撑板113固定在底板111上,加强筋112与底板111、支撑板113连接。
本实施例中限位座一11、限位座二12中的支撑板113均上设置有止动螺栓、螺母。
本实施例中机械手夹爪6中的多个爪子62用于夹持双螺杆夹麻器17,导轨一15、导轨二16根据实际需求设置在双螺杆夹麻器转角搬运机械装置的两侧,导轨一15、导轨二16用于双螺杆夹麻器17的传输。
本实施例各部分功能如下:箱体1用于机械机构、电气控制器件和气动部件的安装场所,拉摆臂机构2将夹麻器拉进机械夹爪,推摆臂机构3将夹麻器推出机械夹爪,机械手夹爪6、检测机构4用于夹麻器的夹持、检测,旋转翻转机构5实现夹麻器顺时针90度旋转和90翻转功能。
如图1所示,为双螺杆夹麻器转角搬运机械装置应用场景示意图,本实施例双螺杆夹麻器转角搬运机械装置专门用于双螺杆夹麻器17的90度转角搬运,同时在搬运的过程中实现夹麻器90度翻转功能。
通过上述阐述,本领域的技术人员已能实施。
此外,需要说明的是,本说明书中所描述的具体实施例,其零件、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本发明结构所作的举例说明。凡依据本发明专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本发明专利的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
文章摘自国家发明专利,一种双螺杆夹麻器转角搬运机械装置,发明人:林佳家,张忠明,申请号:202512036057.8,申请日:2025.12.31。
