摘 要:本发明公开了一种胡麻旋耕施肥播种一体机,涉及胡麻种植机械技术领域,本发明包括架体,架体底部设有旋耕组件,架体上部设有混料组件,架体侧部设有播种组件;播种组件包括设置在架体底部的第一转轴以及设置在架体侧部的播种箱,播种箱侧部设有控制器,控制器内部设有控制系统;第一转轴端部设有移动轮,移动轮上设有速度传感器,播种箱底部贯通连接有九个漏斗,九个漏斗等间距阵列分布,漏斗底部贯通连接有下料管,下料管弯曲设置,下料管弯曲方向与移动轮移动方向相反,下料管底部做切角处理,每个下料管上设有电磁阀。本发明为一种胡麻旋耕施肥播种一体机,播种密度能够实现人工设定,且播种密度更加均匀,节省人力。
权利要求书
1.一种胡麻旋耕施肥播种一体机,其特征在于:包括架体(1),所述架体(1)底部设有旋耕组件(2),所述架体(1)上部设有混料组件(3),所述架体(1)侧部设有播种组件(4);
所述播种组件(4)包括设置在所述架体(1)底部的第一转轴(401)以及设置在所述架体(1)侧部的播种箱(402),所述播种箱(402)侧部设有控制器(403),所述控制器(403)内部设有控制系统;所述第一转轴(401)端部设有移动轮(404),所述移动轮(404)上设有速度传感器(405),所述播种箱(402)底部贯通连接有九个漏斗(406),九个所述漏斗(406)等间距阵列分布,所述漏斗(406)底部贯通连接有下料管(407),所述下料管(407)弯曲设置,所述下管(407)弯曲方向与所述移动轮(404)移动方向相反,所述下料管(407)底部做切角处理,每个所述下料管(407)上设有电磁阀(408);
所述控制系统包括输入单元、处理单元以及驱动单元,所述输入单元主要用于通过控制器(403)输入播种密度P(kg/m2),所述输入单元通过所述速度传感器(405)获取所述移动轮(404)的移动速度V(m/s),所述处理单元获取所述播种箱(402)的宽度H(m),所述处理单元获取所述电磁阀(408)的下料速度U(kg/s),在移动轮(404)前进时间为t(s)时,移动轮(404)前进的距离![]() ;播种面积S=LH,下料总量M=9Ut;播种密度等于
;播种面积S=LH,下料总量M=9Ut;播种密度等于![]() ;因此,
;因此,![]() 在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,所述驱动单元通过获取移动速度V实现通过电磁阀(408)控制下料速度U,使得保持播种密度P恒定。
在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,所述驱动单元通过获取移动速度V实现通过电磁阀(408)控制下料速度U,使得保持播种密度P恒定。
2.根据权利要求1所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述旋耕组件(2)包括设置在所述架体(1)底部的第二转轴(201),所述第二转轴(201)上设有等间距阵列分布的旋耕刀(202),所述旋耕刀(202)弯曲设置。
3.根据权利要求2所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述旋耕组件(2)还包括设置在所述第一转轴(401)上的配重滚轮(203)以及设置在所述架体(1)底部的罩体(204),所述罩体(204)板包裹所述旋耕刀(202)。
4.根据权利要求3所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述播种箱(402)上端通过合页连接有播种盖(409),所述播种盖(409)与所述播种箱(402)之间连接有第一插销(410)。
5.根据权利要求4所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述混料组件(3)包括设置在所述架体(1)顶部的混料箱(302),所述混料箱(302)上活动设有第一轴(303)以及第二轴(304),所述第一轴(303)以及所述第二轴(304)关于所述混料箱(302)中轴线对称分布,所述第一轴(303)以及所述第二轴(304)上设有混料杆(305)。
6.根据权利要求5所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述第一转轴(401)一端设有第一皮带轮(306),所述第一轴(303)上设有第二皮带轮(307)以及第三皮带轮(308),所述混料箱(302)侧部设有辅助轴(309),所述辅助轴(309)上设有第四皮带轮(310)以及第一齿轮(311),所述第二轴(304)端部设有第二齿轮(312),所述第一齿轮(311)与所述第二齿轮(312)相互啮合,所述第一皮带轮(306)与所述第二皮带轮(307)通过皮带条活动连接,所述第三皮带轮(308)与所述第四皮带轮(310)通过另一皮带条活动连接。
7.根据权利要求6所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述混料箱(302)上端通过合页连接有混料盖(301),所述混料盖(301)与所述混料箱(302)之间连接有第二插销(313),所述混料箱(302)与所述播种箱(402)之间连接有方管。
8.根据权利要求6所述的一种胡麻旋耕施肥播种一体机,其特征在于:所述第二转轴(201)端部设有驱动皮带轮(5),所述架体(1)中部开设有螺纹通孔。
技术领域
本发明涉及胡麻种植机械技术领域,特别涉及一种胡麻旋耕施肥播种一体机。
背景技术
胡麻是胡麻科胡麻属植物,也称巨胜、方茎、油麻、脂麻,是一种油料作物,胡麻适宜在冷降、干旱、盐碱的气候生长,在油麻种植过程中需要用到旋耕机进行播种,现有的油麻播种还是传统的播种方式,先人工进行施肥,在对施肥完成的土地进行旋耕,旋耕完成最后进行播种。
然而现有的油麻播种装置在使用时存在一些弊端,比如:
首先需要分施肥、旋耕以及播种三步骤进行,使得播种效率低,较为麻烦,同时需要人工施肥,费时费力,且在播种的过程中,播种机的下料速度一定,拖拉机在带动播种机播种过程中,当拖拉机移动至地头时,拖拉机需要转向,使得拖拉机速度变低,此时播种机下料速度不变,使得在拖拉机速度变低的地方播种密度较大,植物需要有适当的播种密度,若植物播种密度过大,会影响植物生长,传统的解决方式是,在植物长牙后,人工拔除多余的胡麻苗,往往费时费力,为此,我们提出一种胡麻旋耕施肥播种一体机。
发明内容
有鉴于此,本发明的目的在于提出一种胡麻旋耕施肥播种一体机,以解决油麻播种装置存在播种过程费时费力以及播种密度不均匀的问题。
基于上述目的,本发明提供了一种胡麻旋耕施肥播种一体机,包括架体,所述架体底部设有旋耕组件,所述架体上部设有混料组件,所述架体侧部设有播种组件;
所述播种组件包括设置在所述架体底部的第一转轴以及设置在所述架体侧部的播种箱,所述播种箱侧部设有控制器,所述控制器内部设有控制系统;所述第一转轴端部设有移动轮,所述移动轮上设有速度传感器,所述播种箱底部贯通连接有九个漏斗,九个所述漏斗等间距阵列分布,所述漏斗底部贯通连接有下料管,所述下料管弯曲设置,所述下料管弯曲方向与所述移动轮移动方向相反,所述下料管底部做切角处理,每个所述下料管上设有电磁阀;
所述控制系统包括输入单元、处理单元以及驱动单元,所述输入单元主要用于通过控制器(403)输入播种密度P(kg/m2),所述输入单元通过所述速度传感器(405)获取所述移动轮(404)的移动速度V(m/s),所述处理单元获取所述播种箱(402)的宽度H(m),所述处理单元获取所述电磁阀(408)的下料速度U(kg/s),在移动轮(404)前进时间为t(s)时,移动轮(404)前进的距离![]() ;播种面积S=LH,下料总量M=9Ut;播种密度等于
;播种面积S=LH,下料总量M=9Ut;播种密度等于![]() ;因此,
;因此,![]() 在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,所述驱动单元通过获取移动速度V实现通过电磁阀(408)控制下料速度U,使得保持播种密度P恒定。
在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,所述驱动单元通过获取移动速度V实现通过电磁阀(408)控制下料速度U,使得保持播种密度P恒定。
进一步地,所述旋耕组件包括设置在所述架体底部的第二转轴,所述第二转轴上设有等间距阵列分布的旋耕刀,所述旋耕刀弯曲设置。
进一步地,所述旋耕组件还包括设置在所述第一转轴上的配重滚轮以及设置在所述架体底部的罩体,所述罩体板包裹所述旋耕刀。
进一步地,所述播种箱上端通过合页连接有播种盖,所述播种盖与所述播种箱之间连接有第一插销。
进一步地,所述混料组件包括设置在所述架体顶部的混料箱,所述混料箱上活动设有第一轴以及第二轴,所述第一轴以及所述第二轴关于所述混料箱中轴线对称分布,所述第一轴以及所述第二轴上设有混料杆。
进一步地,所述第一转轴一端设有第一皮带轮,所述第一轴上设有第二皮带轮以及第三皮带轮,所述混料箱侧部设有辅助轴,所述辅助轴上设有第四皮带轮以及第一齿轮,所述第二轴端部设有第二齿轮,所述第一齿轮与所述第二齿轮相互啮合,所述第一皮带轮与所述第二皮带轮通过皮带条活动连接,所述第三皮带轮与所述第四皮带轮通过另一皮带条活动连接。
进一步地,所述混料箱上端通过合页连接有混料盖,所述混料盖与所述混料箱之间连接有第二插销,所述混料箱与所述播种箱之间连接有方管。
进一步地,所述第二转轴端部设有驱动皮带轮,所述架体中部开设有螺纹通孔。
与现有技术相比,本发明具有如下有益效果:
本发明中,旋耕组件主要用于对土地进行旋耕,混料组件主要完成胡麻种子与复合肥的混合,播种组件主要完成恒定播种密度下进行播种,本发明只需一次就完成施肥、旋耕以及播种,提高播种效率,节约人力资源。
本发明中,输入单元主要用于通过控制器输入播种密度P(kg/m2),输入单元通过速度传感器获取移动轮的移动速度V(m/s),处理单元获取播种箱的宽度H(m),处理单元获取电磁阀408的下料速度U(kg/s),在移动轮前进时间为t(s)时,移动轮(404)前进的距离![]() ;播种面积S=LH,下料总量M=9Ut;播种密度等于
;播种面积S=LH,下料总量M=9Ut;播种密度等于![]() ;因此,
;因此,![]() 在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,驱动单元通过获取移动速度V实现通过电磁阀控制下料速度U,使得保持播种密度P恒定;使得本发明能够在拖拉机移动过程中,在拖拉机不匀速运动时,依旧实现恒定的播种密度下进行播种,同时具体的播种密度还可以人工自行设定。
在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,驱动单元通过获取移动速度V实现通过电磁阀控制下料速度U,使得保持播种密度P恒定;使得本发明能够在拖拉机移动过程中,在拖拉机不匀速运动时,依旧实现恒定的播种密度下进行播种,同时具体的播种密度还可以人工自行设定。
附图说明
图1为本发明一种胡麻旋耕施肥播种一体机的等轴侧结构示意图;
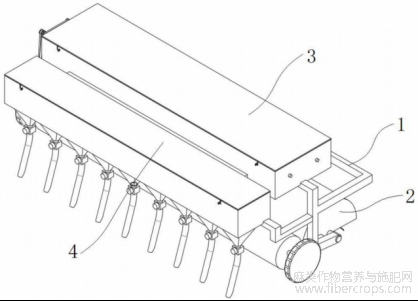
图1
图2为本发明一种胡麻旋耕施肥播种一体机的整体结构示意图;
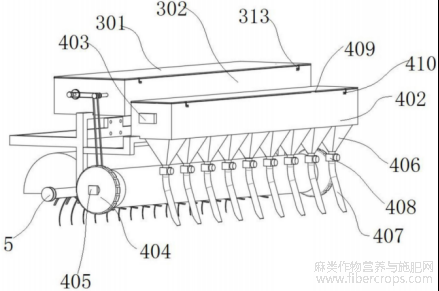
图2
图3为本发明一种胡麻旋耕施肥播种一体机中混料盖开启状态下的整体结构示意图;
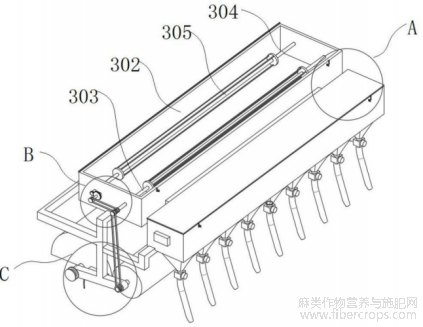
图3
图4为本发明图3中A处的局部放大结构示意图;
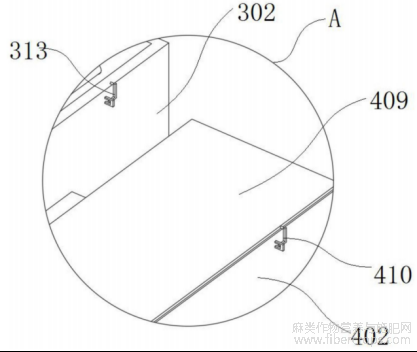
图4
图5为本发明图3中B处的局部放大结构示意图;
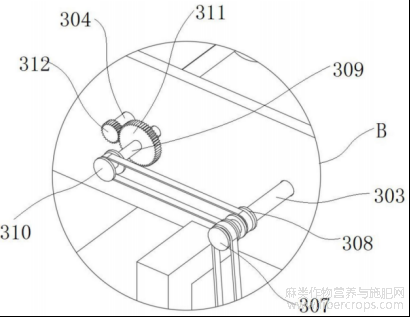
图5
图6为本发明图3中C处的局部放大结构示意图;
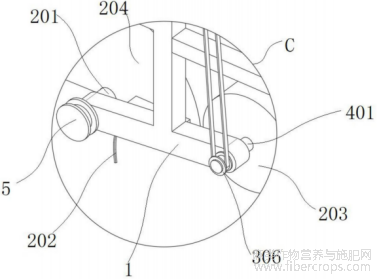
图6
图7为本发明一种胡麻旋耕施肥播种一体机的侧视结构示意图。
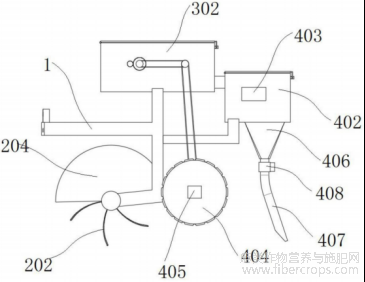
图7
图中:1、架体;2、旋耕组件;3、混料组件;4、播种组件;5、驱动皮带轮;201、第二转轴;202、旋耕刀;203、配重滚轮;204、罩体;301、混料盖;302、混料箱;303、第一轴;304、第二轴;305、混料杆;306、第一皮带轮;307、第二皮带轮;308、第三皮带轮;309、辅助轴;310、第四皮带轮;311、第一齿轮;312、第二齿轮;313、第二插销;401、第一转轴;402、播种箱;403、控制器;404、移动轮;405、速度传感器;406、漏斗;407、下料管;408、电磁阀;409、播种盖;410、第一插销。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,对本发明进一步详细说明。
需要说明的是,除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
请一并参阅图1?图7,其中,图1为本发明一种胡麻旋耕施肥播种一体机的等轴侧结构示意图;图2为本发明一种胡麻旋耕施肥播种一体机的整体结构示意图;图3为本发明一种胡麻旋耕施肥播种一体机中混料该开启状态下的整体结构示意图;图4为本发明图3中A处的局部放大结构示意图;图5为本发明图3中B处的局部放大结构示意图;图6为本发明图3中C处的局部放大结构示意图;图7为本发明一种胡麻旋耕施肥播种一体机的侧视结构示意图。
一种胡麻旋耕施肥播种一体机,包括架体1,架体1底部设有旋耕组件2,架体1上部设有混料组件3,架体1侧部设有播种组件4;
其中,在实际使用中,架体1主要与拖拉机进行连接,架体1同时用于支撑旋耕组件2、混料组件3以及播种组件4,旋耕组件2主要用于对土地进行旋耕,混料组件3主要完成胡麻种子与复合肥的混合,播种组件4主要完成恒定播种密度下进行播种,本发明只需一次就完成施肥、旋耕以及播种,提高播种效率,节约人力资源;
播种组件4包括设置在架体1底部的第一转轴401以及设置在架体1侧部的播种箱402,播种箱402侧部设有控制器403,控制器403内部设有控制系统;第一转轴401端部设有移动轮404,移动轮404上设有速度传感器405,播种箱402底部贯通连接有九个漏斗406,九个漏斗406等间距阵列分布,漏斗406底部贯通连接有下料管407,下料管407弯曲设置,下料管407弯曲方向与移动轮404移动方向相反,下料管407底部做切角处理,每个下料管407上设有电磁阀408;
本发明中,电磁阀408主要用于控制下料量,速度传感器405主要用于活动设备前进速度;
控制系统包括输入单元、处理单元以及驱动单元,输入单元主要用于通过控制器403输入播种密度P(kg/m2),输入单元通过速度传感器405获取移动轮404的移动速度V(m/s),处理单元获取播种箱402的宽度H(m),处理单元获取电磁阀408的下料速度U(kg/s),在移动轮404前进时间为t(s)时,移动轮(404)前进的距离![]() ;播种面积S=LH,下料总量M=9Ut;播种密度等于
;播种面积S=LH,下料总量M=9Ut;播种密度等于![]() ;因此,
;因此,![]() 在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,驱动单元通过获取移动速度V实现通过电磁阀408控制下料速度U,使得保持播种密度P恒定;使得本发明能够在拖拉机移动过程中,在拖拉机不匀速运动时,依旧实现恒定的播种密度下进行播种,同时具体地播种密度还可以人工自行设定。
在给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,驱动单元通过获取移动速度V实现通过电磁阀408控制下料速度U,使得保持播种密度P恒定;使得本发明能够在拖拉机移动过程中,在拖拉机不匀速运动时,依旧实现恒定的播种密度下进行播种,同时具体地播种密度还可以人工自行设定。
进一步地,旋耕组件2包括设置在架体1底部的第二转轴201,第二转轴201上设有等间距阵列分布的旋耕刀202,旋耕刀202弯曲设置;第二转轴201端部设有驱动皮带轮5,架体1中部开设有螺纹通孔;
在实际使用中,通过架体1的螺纹通孔将设备与拖拉机连接,同时使用皮带完成拖拉机与驱动皮带轮5之间的驱动连接,实现驱动第二转轴201转动,第二转轴201带动旋202旋转,实现对土地进行旋耕。
进一步地,旋耕组件2还包括设置在第一转轴401上的配重滚轮203以及设置在架体1底部的罩体204,罩体204板包裹旋耕刀202;
配重滚轮203实现平整土地,通过设置罩体204防止旋耕过程中土壤飞溅,保证旋耕效果。
进一步地,播种箱402上端通过合页连接有播种盖409,播种盖409与播种箱402之间连接有第一插销410,播种盖409主要用于封闭播种箱402,有效防止播种箱402内的种子以及复合肥飞溅。
进一步地,混料组件3包括设置在架体1顶部的混料箱302,混料箱302上活动设有第一轴303以及第二轴304,第一轴303以及第二轴304关于混料箱302中轴线对称分布,第一轴303以及第二轴304上设有混料杆305,第一转轴401一端设有第一皮带轮306,第一轴303上设有第二皮带轮307以及第三皮带轮308,混料箱302侧部设有辅助轴309,辅助轴309上设有第四皮带轮310以及第一齿轮311,第二轴304端部设有第二齿轮312,第一齿轮311与第二齿轮312相互啮合,第一皮带轮306与第二皮带轮307通过皮带条活动连接,第三皮带轮308与第四皮带轮310通过另一皮带条活动连接。
在实际使用中,随着移动轮404的旋转,带动第一转轴401转动,第一转轴401带动第一皮带轮306旋转,第一皮带轮306带动第二皮带轮307旋转,实现驱动第一轴303旋转,进而驱动第三皮带轮308旋转,在皮带条转动下,驱动第四皮带轮310旋转,第四皮带轮310带动辅助轴309旋转,辅助轴309带动第一齿轮311旋转,第一齿轮311驱动第二齿轮312旋转,实现驱动第二轴304旋转,进而使得第一轴303以及第二轴304反向旋转,最终使得两个混料杆305反向旋转,完成对种子以及复合肥混合,使得种子与复合肥混合得更加均匀。
进一步地,混料箱302上端通过合页连接有混料盖301,混料盖301与混料箱302之间连接有第二插销313,混料箱302与播种箱402之间连接有方管;
混料盖301主要用于封闭混料箱302,防止种子与复合肥飞溅,混合后的种子与复合肥从方管中进入播种箱402内部,本发明使用移动轮404的转速驱动进行混料,不使用拖拉机的驱动进行混料,避免混料杆305转动过快迫害种子。
综上所述,在实际使用时,首先通过架体1的螺纹通孔将设备与拖拉机连接,同时使用皮带完成拖拉机与驱动皮带轮5之间的驱动连接,然后按照种子与复合肥的比例,打开混料盖301,向混料箱302中加入种子与复合肥,同时通过控制器403设定播种密度;然后拖拉机驱动,开始在田地内工作,使用皮带完成拖拉机与驱动皮带轮5之间的驱动连接,实现驱动第二转轴201转动,第二转轴201带动旋耕刀202旋转,实现对土地进行旋耕;使用皮带完成拖拉机与驱动皮带轮5之间的驱动连接,实现驱动第二转轴201转动,第二转轴201带动旋耕刀202旋转,实现对土地进行旋耕;输入单元通过速度传感器405获取移动轮404的移动速度V(m/s),处理单元给定一个定值的播种密度P后,每给定一个移动速度V,就会有一个下料速度U,驱动单元通过获取移动速度V实现通过电磁阀408控制下料速度U,使得保持播种密度P恒定;种子与复合肥的混合料从漏斗406进入下料管407内,最后从下料管407底部进入土壤内部,完成恒定播种密度播种胡麻。
所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本发明的范围(包括权利要求)被限于这些例子;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明它们没有在细节中提供。
本发明旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本发明的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本发明的保护范围之内。
文章摘自国家发明专利,一种胡麻旋耕施肥播种一体机,发明人:张素梅,刘杰,宋谦,张婷,曹丽,申请号:202310571114.0,申请日:2023.05.20
