摘 要:茎杆倒伏是苎麻三麻培育中最常见的灾害,传统的监测方法具有耗时耗力、不及时等局限性。提出了一种基于无人机航拍获取苎麻倒伏信息的方法,首先利用Pix4D Mapper软件生成苎麻的冠层正射影像和数字表面模型(digital surface model,DSM),基于正射影像提取苎麻光谱、纹理及形状特征,基于DSM提取苎麻株高指标,最后结合3种机器学习算法构建正常/倒伏苎麻分类模型。结果表明,基于DSM提取的株高信息可以有效代替大田实测株高,模型R2为0.899。倒伏和正常苎麻在光谱、纹理、形状及株高特征上具有差异。在3种机器学习算法中,支持向量机和决策树模型的性能最好,准确率达到99%,能够高效地识别苎麻倒伏地块。以上研究结果为准确、快速评估作物倒伏情况提供了技术支撑。
关键词:苎麻;倒伏;无人机;可见光相机;数字表面模型
倒伏灾害一直是农业生产领域关注的热点难题。作物倒伏会造成产量和质量下降,影响农业机械自动化收割。倒伏灾情严重时,小麦、水稻等主要粮食作物产量损失率在22%左右,极端情况下甚至会绝产,对粮食安全造成重大威胁[1]。抗倒伏能力是作物良种选育研究中重要的遗传特性以及选育标准,但倒伏信息获取与评估仍是亟需解决的难题[2,3]。目前,倒伏已纳入我国农业保险体系,及时、有效地获取大面积农田的倒伏信息是科学、有序、精准进行农业保险理赔以及救灾补偿的基础[4]。快速、准确的倒伏信息获取手段对于作物的生产管理、良种选育以及灾害保险具有重要意义。
早期作物倒伏估测是由人工进行实地调查,然后记录相关倒伏信息。但作物的倒伏具有突发性、随机性以及范围广等特点,传统调查方式难以实现大范围灾情监测和减灾措施实施的及时响应[5]。近年来,近地遥感技术在农业领域发展迅速,使得高精度、高频次、高效率的作物长势信息采集成为可能,为倒伏监测和灾情评估提供了科学方法。基于遥感的作物倒伏研究思路主要有2种。一是基于遥感光谱探测田间作物倒伏状况。倒伏发生时,作物冠层结构具有叶片杂乱,作物茎、穗暴露等特点,因此利用作物不同部位光谱反射率的差异可实现倒伏遥感监测。王猛等[6]发现,倒伏玉米的冠层光谱反射率低于正常玉米,并由此实现倒伏玉米识别。田明璐等[7]发现,多光谱中倒伏水稻在各个波段的反射率均高于正常水稻,利用光谱差异对倒伏水稻的分类精度达到99.04%。陆洲等[8]利用作物的光谱特征识别正常/倒伏水稻,其中高光谱的红光波段、差异植被指数(difference vegetation index,DVI)的差异最大。二是基于遥感空间结构数据探测田间作物倒伏状况,空间结构数据包括作物株高以及冠层纹理特征[9]。倒伏灾害发生时,直立生长的作物会歪斜或匍倒,导致群体绝对株高降低,冠层纹理的均一性被破坏。胡琪等[10]通过计算小麦的绝对高度监测倒伏状况,在大面积倒伏灾害识别中,正常/严重倒伏的识别精度最高。董锦绘等[11]通过红绿蓝(red green blue,RGB)色彩模式的三通道特征参数识别正常/倒伏小麦存在一定误差,提出需要结合光谱信息建立基于作物的数字表面模型(digital surface model,DSM)影像。赵立成等[12]在无人机可见光影像数据上增加了DSM数据,依靠田埂/小麦、正常/倒伏之间冠层高度差异消除了光谱中的“椒盐”现象,提高了识别精度。前人对基于多光谱遥感的作物倒伏监测进行了大量研究,但忽视了作物冠层影像包含的空间结构信息的影响,缺乏多维数据比对。同时,虽然有研究证明利用无人机(unmanned aerial vehicles,UAV)获取的DSM数据能够有效监测作物倒伏信息,但只考虑了作物的绝对高度,而株高受遗传因素、栽培管理、生长环境等众多因素影响,绝对高度在研究中不具备普适性。因此,需要引入更灵活的株高相关指标进行倒伏研究。
倒伏作为苎麻生产中常见的农业灾害,严重影响了苎麻的高产优质。当前,有关作物倒伏研究多集中于水稻、小麦等作物,研究内容侧重正常/倒伏作物分类以及倒伏面积提取,鲜有关于苎麻倒伏监测和倒伏灾害胁迫下多生长指标的响应解析研究。本研究采用无人机遥感系统获取苎麻倒伏前后的冠层可见光影像,利用数字表面模型提取株高相关参数,正射影像提取冠层纹理特征,进而基于多维数据,定量评估苎麻倒伏情况。
1 材料与方法
1.1 试验区域
试验区位于湖南省长沙市芙蓉区湖南农业大学耘园教学基地(28°11′1.981″N、113°4′10.159″E,图1)。该区属典型的亚热带季风性湿润气候,降水充沛,光热条件良好,是苎麻生长的主产区之一。试验区地势平坦,无遮挡物,为无人机进行遥感作业提供了有利条件。试验地面积为15m×60m,布置154个小区,小区种植品种无重复,共包含154份苎麻种质资源。各小区面积2.0m×1.8m,2行×4蔸,蔸间距0.4m,行间距0.6m,排水沟宽为0.5m。苎麻于2017年12月育苗移栽,2018年6月破杆。试验区土壤成分均一且土壤肥沃,灌溉排水便捷,田间水肥管理一致。
1.2 无人机航拍照片获取
于2019、2020年苎麻三麻的关键生育期即苗期、封行期、旺长期和成熟期,采用大疆悟2四旋翼无人机(Inspire 2 DJI,深圳)搭载蝉思X5s高清数码相机进行苎麻倒伏监测。该相机有效像素可达2080万,最大分辨率为5280×3956。为保证太阳辐射稳定和充足,选择晴朗无云天气于当地时间12:00—14:00进行作业。无人机遥感平台采用DJI GO软件在指定区域内自动生成航线,飞行高度20m,云台俯仰角-90°,飞行速度2m·s-1,航向及旁向重叠度均为85%。所搭载数码相机的曝光模式选择自动。各生育期飞行任务的拍摄参数、航线规划一致,在飞行任务执行前设置完成。
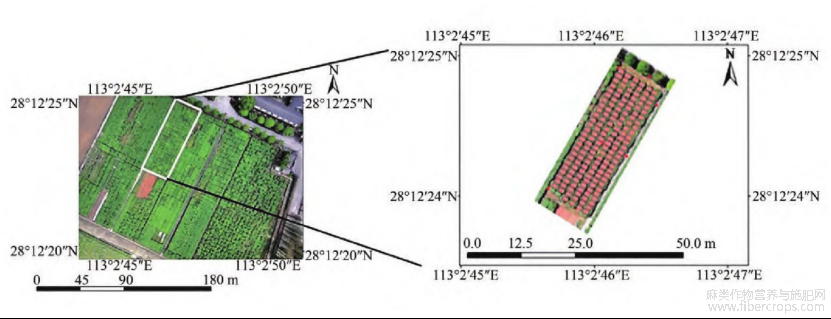
图1 试验小区分布
1.3 图像处理
无人机拍摄的影像采用Pix4D Mapper软件进行拼接。利用Arc GIS 10.2软件中的栅格工具,在全幅DSM影像上构建小区尺度的矩形感兴趣区域(area of interest,AOI)。AOI绘制时,沿小区四周边缘余留10%,同时按小区行列号进行编号,并以shapefile文件保存。
1.4 特征指标提取方法
1.4.1 株高指标的获取
株高是能够直接表征作物倒伏情况的关键特征参数,一般情况下,倒伏作物的冠层高度会低于正常作物。本研究采用植株上边界与地面之间的高程差值来计算苎麻株高[13]。植株上边界通过航拍获取的植株冠层DSM估算,地面高程通过试验地裸土DSM估算。结合株高数据计算倒伏前后株高变化,株高发生正向变化判定为正常苎麻,发生反向变化判定为倒伏苎麻。混合点云在一定程度上会导致估测株高存在误差,因此以降低幅度为10%指标检验初步判定为倒伏的苎麻。
1.4.2 纹理、光谱、形状指标的获取
通过目视解译及地面调查结果从影像上筛选倒伏和正常苎麻对象,进而分别获取不同类型地块的光谱、纹理及形状特征。其中,光谱特征通过RGB不同波段数字量化值(digital number,DN)组合而成。纹理特征选用灰度共生矩阵(gray level co-occurrence matrices,GLCM),包括同质度、对比度、熵与均值4个特征[14]。本研究在经验累积以及不断试错的基础上,共选取了5个颜色特征、4个纹理特征及4个形状特征进行分析。提取正常苎麻地块138个,倒伏苎麻地块16个。相关特征描述与计算方法如表1所示。
1.5 苎麻倒伏识别模型构建
利用随机森林(random forest,RF)、支持向量机(support vector machine,SVM)、决策树(decision tree,DT)3种机器算法,以70%的数据为训练集,30%的数据为测试集,建立3个分类模型。
2 结果与分析
2.1 株高提取精度分析
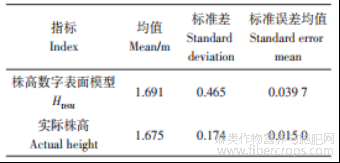
基于株高数字表面模型(HDSM)和实测株高构建的一元线性回归模型如式1所示,R2为0.899,均方根误差(root mean squared error,RMSE)为0.234,模型拟合程度较好,表明遥感影像提取株高具有代替大田群体苎麻株高的可行性。表2为株高数字表面模型与实际株高的对比分析,实际株高均值比遥感影像提取的株高均值低1.6 cm,误差范围在可接受范围。综上所述,遥感影像提取的株高可用于计算倒伏前后株高差异。
![]()
2.2 正常苎麻与倒伏苎麻的特征差异分析
图2为倒伏和正常苎麻在光谱、纹理、形状和株高数字表面模型特征上的差异对比。在光谱特征上,倒伏地块的红色标准值、绿色标准值、蓝色标准值、绿叶植被指数与超绿植被指数均低于正常苎麻分布的地块,其中绿色标准值、绿叶植被指数与超绿植被指数的倒伏地块分布集中。在纹理特征上,倒伏地块灰度共生矩阵同质度、对比度、熵以及均值都明显低于正常苎麻地块,且2类对象在灰度共生矩阵同质度、对比度、熵这3项纹理特征上没有交集,表明纹理特征是分类倒伏苎麻和正常苎麻的重要特征。在形状特征上,倒伏地块在边界指数、圆度、紧凑度3项指标上都高于正常地块,而密度低于正常地块;在DSM值上,倒伏苎麻DSM值整体低于正常地块。成熟期正常苎麻株高数字表面模型值在0.956~3.563m,而倒伏地块株高数字表面模型值在0.512~1.256m,株高数字表面模型中所有低于正常苎麻株高最小值0.956m的植株都呈现出不同程度的倒伏形态,表明株高数字表面模型极具区分倒伏和正常苎麻的潜力。
表1 特征描述与计算
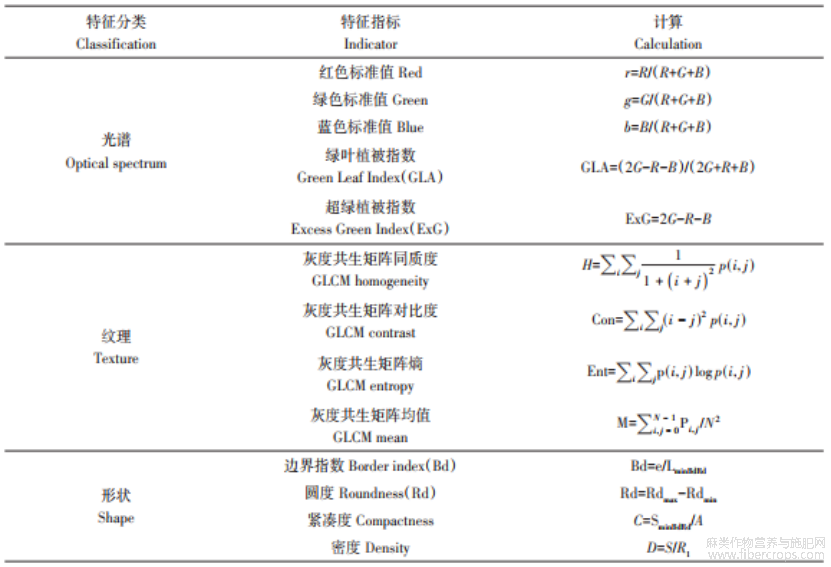
注:R表示红色图层包含的总像素灰度值的平均值,G表示绿色图层包含的总像素灰度值的平均值,B表示蓝色图层包含的总像素灰度值的平均值。i,j分别为像素点行数、列数;p(i,j)表示影像中(i,j)位置的灰度值;N为行或列数。e表示对象影像边界长度,L min Bd Rd表示对象最小包围矩形的周长,Rdmax表示对象的最大内包围圆的半径,Rdmin表示最小外包围圆半径,Smin Bd Rd表示最小包围矩形的面积,A表示对象的实际面积,S表示影像对象像素之和,R1表示影像对象的协方差矩阵。
表2 株高数字表面模型和实际株高
综上,结合倒伏与正常地块间的特征差异程度,选取了11项特征值,分别为3项光谱特征绿色标准值、绿叶植被指数和超绿植被指数;3项纹理特征灰度共生矩阵同质度、对比度、熵;4项性状特征边界指数、紧凑度、圆度、密度以及HDSM特征值,作为区分倒伏苎麻和正常苎麻的光谱特征。
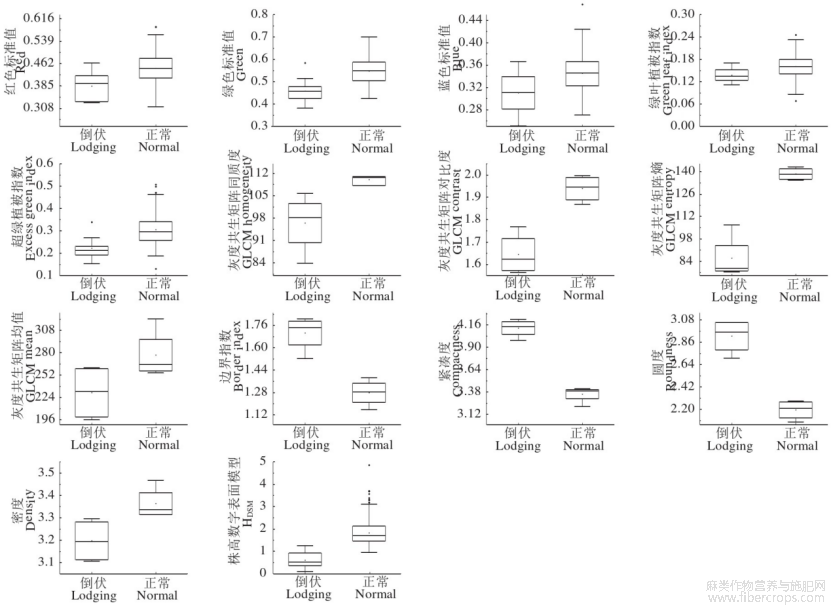
图2 倒伏和正常苎麻特征差异
2.3 模型对比分析
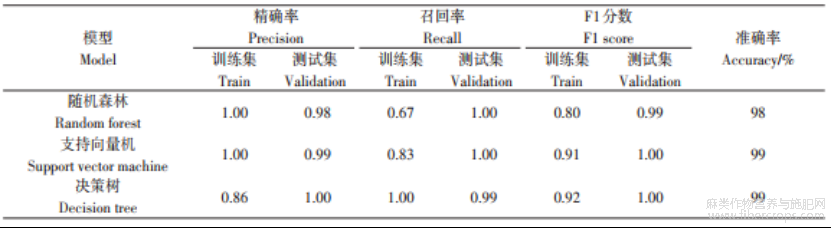
由表3可知,随机森林(RF)的精确率为0.98,召回率为1.00,F1分数为0.99,准确率为98%;支持向量机(SVM)的精确率为0.99,召回率为1.00,F1分数为1.00,准确率为99%。决策树(DT)的精确率为1.00,召回率为0.99,F1分数为1.00,准确率为99%。综上,3种机器学习算法在识别正常苎麻和倒伏苎麻上均有较高的准确率,其中SVM与DT模型表现更好,基于机器学习的正常苎麻和倒伏苎麻地块快速识别是可行的。
表3 3种机器学习模型结果
2.4 倒伏胁迫下苎麻生物量的差异分析
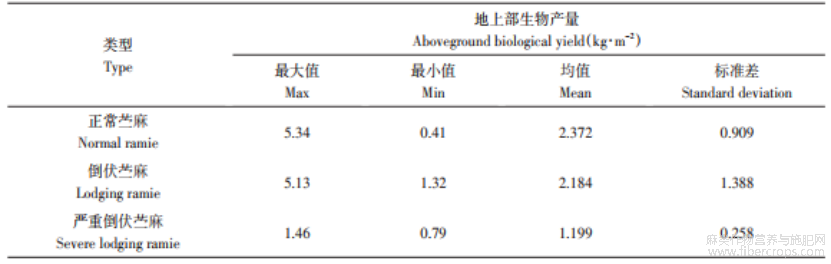
以倒伏后的苎麻生物量为指标反映倒伏灾害对苎麻生长状况的影响。由表4可知,发生严重倒伏的苎麻生物量均值仅为1.199kg·m-2,比正常苎麻生物量均值低1.173kg·m-2,比发生一般倒伏的苎麻生物量均值低0.985kg·m-2。由此可见,苎麻倒伏对其产量具有很大影响,控制苎麻抗倒程度是提高其产量和质量的重要措施。
表4 正常苎麻和倒伏苎麻的生物量
3 讨论
基于无人机航拍图像获取苎麻倒伏信息相较于传统的人工方法具有快捷、准确、无损等优势,为倒伏灾害的识别和及时防治提供了技术支撑。梁永检等[15]基于DSM对甘蔗全生育期的株高监测,预测精度较高,R2为0.961。本研究中,基于DSM的苎麻株高估测精度为0.899,可能是由于无人机飞行高度较低,桨叶旋转产生气流导致部分苎麻倾倒,株高信息受损。
利用特征筛选方法可以获得较高的分类精度。赵静等[16]通过筛选特征植被指数和纹理指数,结合支持向量机构建了基于多光谱的倒伏玉米分类模型,精度达到95.38%。本研究中,增加了纹理、形状、植株高度等特征,共筛选了13项特征指标,取得了较好的效果。虽然高清数码相机所拍摄的影像获取的植被指数信息少于多光谱信息,但所取得的高精度的空间位置信息和纹理结构信息,是多光谱相机很好的替代[17,18]。
已有研究探讨了基于RGB相机评估倒伏程度的可行性,申华磊等[19]采用深度学习算法建立小麦倒伏面积分割模型,在识别正常和倒伏小麦中获得了97.25%的准确率。深度学习需要使用大量的样本数据,本研究采用的支持向量机、决策树2种机器学习算法适合小样本进行监测,在分类正常苎麻和倒伏苎麻上达到了99%的准确率。因此,利用航拍图像中提取的多种特征指数,结合机器学习算法构建的分类模型用于识别正常苎麻和倒伏苎麻是可行的。但对于苎麻倒伏程度分级与倒伏面积的提取,仍需开展后续试验。
参考文献
[1]刘利华,金再欣,刘小丽,等.水稻倒伏对产量影响的试验结果分析[J].中国稻米,2009(2):19-21.
[2]张建,谢田晋,杨万能,等.近地遥感技术在大田作物株高测量中的研究现状与展望[J].智慧农业,2021,3(1):1-15.ZHANG J, XIE T J, YANG W N, et al.. Research status and prospect on height estimation of field crop using near-field remote sensing technology[J]. Smart Agric., 2021,3(1):1-15.
[3]SU W, ZHANG M, BIAN D, et al.. Phenotyping of corn plants using unmanned aerial vehicle(UAV)images[J/OL]. Remote Sens.,2019,11(17):2021[2022-11-06]. https://doi.org/10.3390/rs11172021.
[4]XUE J,GOU L,ZAO Y S,et al.. Effects of light intensity within the canopy on maize lodging[J]. Field Crops Res., 2016, 188:133-141.
[5]周龙飞.基于多源遥感数据的玉米倒伏灾情监测研究[D].青岛:山东科技大学,2020.ZHOU L F. Monitoring of maize lodging disaster based on multi-source remote sensing data[D]. Qingdao:Shandong University of Science and Technology,2020.
[6]王猛,隋学艳,梁守真,等.夏玉米倒伏模拟试验及遥感监测[J].测绘科学,2017,42(8):137-141.WANG M, SUI X Y, LIANG S Z, et al.. Simulation test and remote sensing monitoring of summer corn lodging[J]. Sci.Survey. Map., 2017,42(8):137-141.
[7]田明璐,班松涛,袁涛,等.基于低空无人机多光谱遥感的水稻倒伏监测研究[J].上海农业学报,2018,34(6):88-93.TIAN M L,BAN S T,YUAN T,et al.. Monitoring of lodged rice using low-altitude UAV based multispectral image[J]. Acta Agric. Shanghai, 2018,34(6):88-93.
[8]陆洲,徐飞飞,罗明,等.倒伏水稻特征分析及其多光谱遥感提取方法研究[J].中国生态农业学报,2021,29(4):751-761.LU Z,XU F F, LUO M,et al.. Characteristic analysis of lodging rice and study of the multi-spectral remote sensing extraction method[J]. Chin. J. Eco-Agric., 2021,29(4):751-761.
[9]樊鸿叶,李姚姚,卢宪菊,等.基于无人机多光谱遥感的春玉米叶面积指数和地上部生物量估算模型比较研究[J].中国农业科技导报,2021,23(9):112-120.FAN H Y,LI Y Y, LU X J,et al.. Comparative analysis of LAI and above-ground biomass estimation models based on UAV multispectral remote sensing[J]. J. Agric. Sci. Technol.,2021,23(9):112-120.
[10]胡琪,武红旗,轩俊伟,等.基于无人机DSM的小麦倒伏信息提取[J].安徽农业科学,2020,48(16):227-231.HU Q, WU H Q, XUAN J W, et al.. Information extraction of wheat lodging based on DSM by UAV remote sensing[J]. J.Anhui Agric. Sci.,2020,48(16):227-231.
[11]董锦绘,杨小冬,高林,等.基于无人机遥感影像的冬小麦倒伏面积信息提取[J].黑龙江农业科学,2016(10):147-152.DONG J H,YANG X D,GAO L,et al.. Information extraction of winter wheat lodging area based on UAV remote sensing image[J]. Heilongjiang Agric. Sci., 2016(10):147-152.
[12]赵立成,段玉林,史云,等.基于无人机DSM的小麦倒伏识别方法[J].中国农业信息,2019,31(4):36-42.ZHAO L C, DUAN Y L, SHI Y, et al.. Wheat lodging identification using DSM by drone[J]. Chin. Agric. Inform.,2019,31(4):36-42.
[13]PÉREZHARGUINDEGUY N,DÍAZ S,GARNIER E,et al.. New handbook for standardised measurement of plant functional traits worldwide[J/OL]. Australian J. Botany, 2013, 61:12225[2022-11-06]. https://doi.org/10.1071/BT12225.
[14]宋茜.农作物空间分布信息提取及其时空格局变化分析研究[D].北京:中国农业科学院,2018.SONG Q. Crop mapping and spatio-temporal analysis of agricultural land-use[D]. Beijing:Chinese Academy of Agricultural Sciences,2018.
[15]梁永检,吴文志,施泽升,等.基于无人机RGB遥感的甘蔗株高估测[J].作物杂志,2023(1):226-232.LIANG Y J,WU W Z,SHI Z S,et al.. Estimation of sugarcane plant height based on UAV RGB remote sensing[J]. Crops,2023(1):226-232.
[16]赵静,闫春雨,杨东建,等.基于无人机多光谱遥感的台风灾后玉米倒伏信息提取[J].农业工程学报,2021,37(24):56-64.ZHAO J, YAN C Y, YANG D J, et al.. Extraction of maize lodging information after typhoon based on UAV multispectral remote sensing[J]. Trans. Chin. Soc. Agric. Eng.,2021,37(24):56-64.
[17]李宗南,陈仲新,王利民,等.基于小型无人机遥感的玉米倒伏面积提取[J].农业工程学报,2014,30(19):207-213.LI Z N,CHEN Z X,WANG L M,et al.. Area extraction of maize lodging based on remote sensing by small unmanned aerial vehicle[J]. Trans. Chin. Soc. Agric. Eng.,2014,30(19):207-213.
[18]毛智慧,邓磊,赵晓明,等.利用无人机遥感提取育种小区玉米倒伏信息[J].中国农学通报,2019,35(3):62-68.MAO Z H, DENG L, ZHAO X M, et al.. Extraction of maize lodging in breeding plot based on UAV remote sensing[J].Chin. Agric. Sci. Bull.,2019,35(3):62-68.
[19]申华磊,苏歆琪,赵巧丽,等.基于深度学习的无人机遥感小麦倒伏面积提取方法[J].农业机械学报,2022,53(9):252-260,341.SHEN H L, SU X Q, ZHAO Q L, et al.. Extraction of lodging area of new wheat varieties by unmanned aerial vehicle remote sensing via deep learning[J]. Trans. Chin. Soc. Agric. Mach.,2022,53(9):252-260,341.
文章摘自:王薇,付虹雨,卢建宁,等. 基于无人机航拍的苎麻倒伏信息解译研究 [J]. 中国农业科技导报, 2024, 26 (03): 91-97. DOI:10.13304/j.nykjdb.2022.1066.
