作者:付虹雨等
来源:
发布时间:2021-10-10
Tag:
点击:
[麻进展] 基于无人机遥感影像的剑麻株数识别
摘 要:准确、快速、无损地获取剑麻株数信息对于剑麻产量估测至关重要。研究以广西壮族自治区钦州市东方农场为试验区,探讨面向对象多尺度分割算法提取剑麻株数信息的可行性。首先基于无人机遥感系统获取的剑麻冠层可见光谱影像,使用Pix4Dmapper拼接重建试验区的全幅正射影像;然后利用面向对象多尺度分割算法分割剑麻中心区域和其他区域,通过采样定义类别特征空间实现株数识别;将基于算法提取的株数与目视解译统计的株数进行对比分析,评估识别精度;最后,基于面对对象分类结果,利用主成分分析法提取表征剑麻主要性状信息的主成分,为剑麻冠层图像特征研究提供参考。结果表明:采用面向对象多尺度分割算法提取剑麻株数的精度在87.1%左右,该方法用于作物株数估测是可行的。
关键词:无人机;剑麻;株数;主成分
剑麻具有纤维质地坚韧、耐磨、耐盐碱、耐腐蚀等众多优势,是我国热区乃至全球最重要的经济作物之一。然而,近年来,随着耕地面积的下降,我国自产的剑麻纤维已经不能满足国内的需要,并且随着剑麻纤维用途的不断增加,剑麻纤维的刚性需求增大,剑麻产业发展陷入困境。在剑麻的产量构成因素中,株数具有决定性意义,实现剑麻株数的识别对于估测剑麻产量、调整生产战略等具有至关重要的意义。
传统剑麻株数调查主要依靠人工实地采集,这种方法虽然准确率高,但费时费力、时效性低,不适合大面积作物信息采集。近年来,农业遥感技术的飞速发展为农业信息的便捷、快速获取提供了可能。在众多遥感平台中,无人机以其特有的机动灵活、高分辨率、低成本、安全性强等优势实现了农业遥感在小型化、实用性以及大众可承受性上的突破。
当前,基于无人机遥感影像识别目标作物的常见方法有两种:基于像元的目标识别和面向对象的目标识别。基于像元的目标识别难以充分利用高分辨率影像提供的丰富信息,并且倾向于关注目标局部而忽略整体结构信息,致使识别精度不高。面向对象方法以分割后产生的多个同质像元组成的对象为基础,充分考虑对象综合特征信息,进而完成目标提取。李明等利用面向对象算法提取了水稻种植区域的光谱、几何和纹理特征,基于综合特征建立了Logistic回归模型对水稻地块进行精准分类。前人曾采用面向对象算法对森林类型进行了识别分类,证明了该方法在森林资源信息调查中的可信性。廖珊珊等基于甘蔗地种植区的光谱、形状、纹理特征,利用eCognition软件进行面向对象分类,有效地提高了甘蔗地识别的精度和效率。随着精准农业对作物密度的空间数据产生的需求,快速、准确实现作物株数测定成为亟待解决的难题。本研究以剑麻为研究对象,基于无人机-可见光遥感系统获取的高清数字影像,尝试采用面向对象多尺度分割算法自动提取剑麻株数,并结合目视解译数据判读结果精度,旨在为估测剑麻产量提供支持,同时也为基于无人机遥感的作物株数识别提供方法补充。
1 研究区概况与数据来源
1.1 研究区概况
试验于广西壮族自治区钦州市浦北县张黄镇东方农场(23°18'10.087″N,108°15'46.626″E)进行,该区域地形相对平坦,为无人机进行剑麻遥感监控提供了条件。同时,东方农场在亚洲东南部季风区内,属于亚热带季风性湿润气候,降水充沛,太阳辐射强,光热条件良好,为剑麻提供了极好的生长环境。本研究选取试验区由9厢组成,每厢46行×2列,共828株剑麻,具体情况见图1。
1.2 数据来源
1.2.1 剑麻冠层遥感影像采集
于2019年4月12日利用无人机平台搭载高分辨率数码相机采集剑麻冠层遥感影像,所用无人机为大疆悟2四旋翼无人机,其总质量为3.3kg,飞行载质量为4kg,最大飞行时间达27min。无人机搭载的高清数码相机为zenmusex5s,配置PanasonicLumix15mm/1.7镜头,质量为461g,有效像素可达2080万,拍摄影像最大分辨率为5280×3956。为避免云层遮挡以及太阳光线影响,选择在10:00~12:00时间段进行飞行。飞行拍摄参数在任务执行前设置完成,具体信息见表1。试验设计的飞行高度为20m,为保证拼接图像信息的完整性,设置了-75°和-90°两种不同的云台俯仰角拍摄方式,并确保主航向上重叠率80%,主航线间图像重叠率70%。

1.2.2 数据预处理
采用Pix4Dmapper软件完成剑麻冠层遥感影像自动拼接,基本操作流程为:检查pos数据中的相片号与图像数据相片号是否一致,以确保经度、纬度、高度、航向倾角、旁向倾角、相片旋角的吻合;通过筛选寻找包含某一点M的全部图像,提取M点的空间位置和姿态信息,完成对M点的还原并生成实验区域的点云图;使用空三射线编辑器加入控制点三维空间信息,保证不同时期获取的拼接图像在同一坐标位置体系下;基于配准后的地理位置,生成最终的剑麻冠层正射影像。为提高计算运行效率,采用Photoshop切片工具对剑麻冠层正射影像进行切割,以3×6为尺度将试验区分为18个小区,每小区图像分辨率为4944×3387,图像位深度为24。
2基于面对对象分类法的剑麻株数提取方法
剑麻株数提取的核心思想是实现剑麻中心区域分割,技术步骤如下:首先,对剑麻冠层影像进行多尺度分割,将若干对象分为目标对象(剑麻中心区域)以及非目标对象,实现非目标对象初步排查;然后,随机采样提取目标对象的图像特征,定义目标对象特征空间;最后,基于提取的多元特征,面向多个对象再次进行分类以识别目标对象。本研究中,使用eCognitionDeveloper软件对剑麻冠层遥感影像进行面向对象多尺度分割。
2.1 多尺度分割
eCognitionDeveloper中有多种分割方式,如多尺度分割、棋盘分割、四叉树分割等,其中多尺度分割是最常用的方式。尺度参数、形状因子、紧致度因子等参数都会直接影响到分割对象的大小以及信息提取的准确度。利用eCognition软件经过多次试验后,选取适合的分割参数。
2.2 特征提取与对象分类
为实现剑麻株数提取,构建剑麻中心区域和其他区域两个类别,采用样本最邻近分类方法,选择具有代表性的训练样本,提取样本特征值以定义样本特征空间。研究选取了纹理、颜色、形状3个特征空间的共21个特征参数作为规则集(包括7个颜色特征参数、7个形状特征参数以及7个纹理特征参数)来建立统计识别函数。最后对图像中若干对象执行分类。为提高分类精度,重复特征提取步骤,将少量被错分的部分进行修正定义以优化分类结果。
2.3 误差评估
采用总体分类精度(OverallAccuracy,OA)和漏分误差(OmissionError,OE)2个指标判别基于面向对象多尺度算法提取剑麻株数的精准度。总体分类精度评价表示所有对象中被正确分类的样本比例,公式如下:
OA=1-|Nd-Nv|/Nv×100%
式中:
Nv—目视解译剑麻总株数;
Nd—计算得到的剑麻总株数。
漏分误差表示实际属于目标对象,而错误被分为非目标对象的样本数。
3 结果与分析
3.1 最优分割尺度及参数的确定
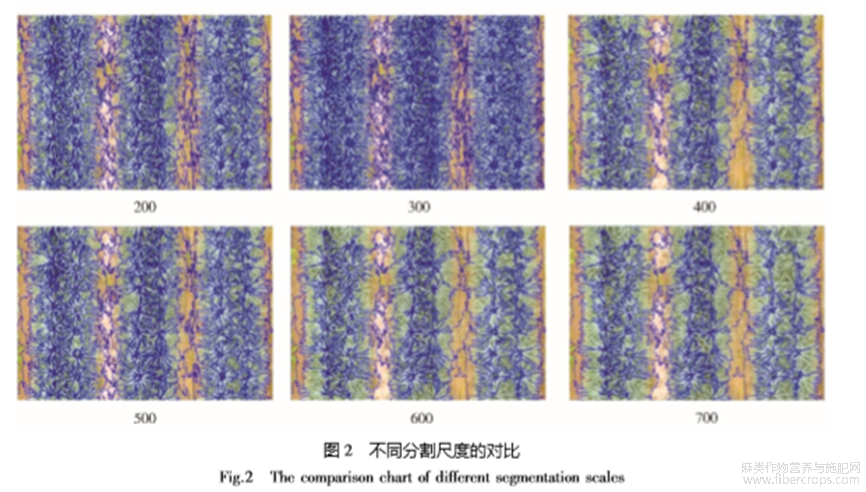
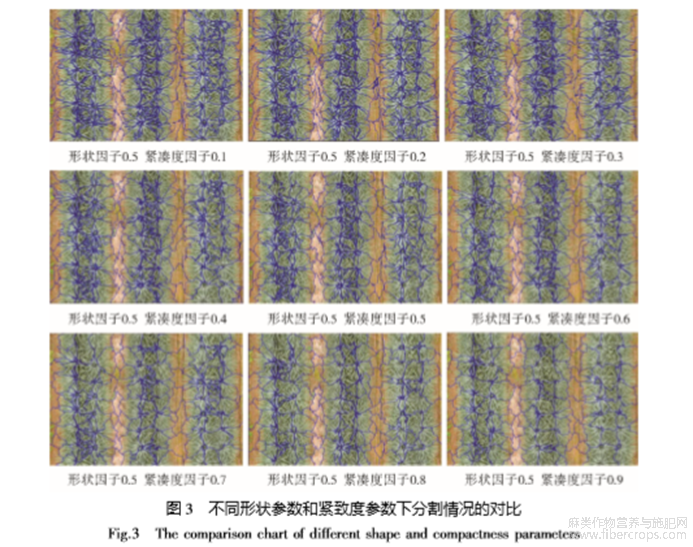
研究尝试了不同分割尺度下对象的分割情况。由图2可以看出,当分割尺度小于400时,影像被分割得十分破碎,剑麻中心区域也被分割为多块小区域;分割尺度为400~500时,剑麻中心区域分割较完整;分割尺度为500~600时,剑麻中心特征区域与其他叶片分割到一起;当分割尺度为600~700时,分割对象面积扩大,剑麻与裸土合并。因此,经多次对比,选择分割尺度为400的条件下,以形状因子和紧凑度因子均为0.5为基准,逐步进行参数调整,得到17组分割结果(图3),对比发现形状因子为0.5、紧凑度因子为0.6是最佳的分割参数,影像分割效果、最好。
3.2 样本特征统计分析
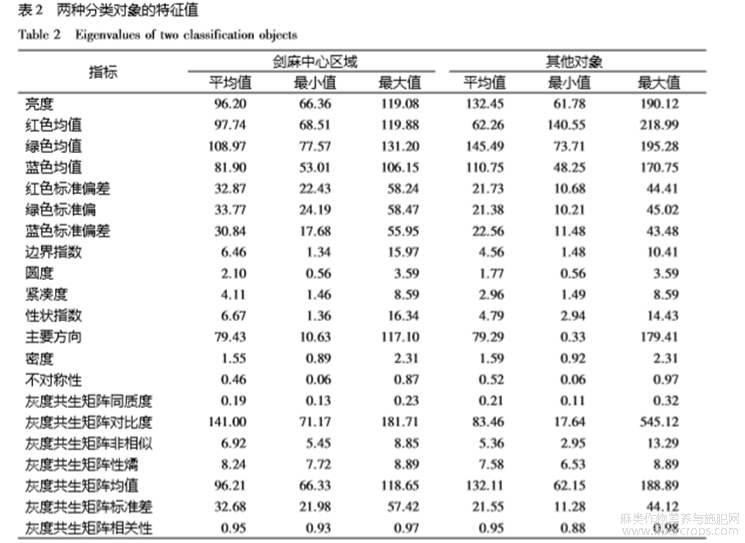
经过多个特征的对比分析,考虑类别之间的距离和运行负荷,研究选取亮度、RGB均值、边界指数、形状指数、密度等21个特征对分割对象执行分类,具体参数如表2所示。分析发现,剑麻中心区域与其他对象在多项特征上具有明显差异,但使用单个特征进行两者区分较难达到较高的分割精度,因此需要取多特征组合进行剑麻中心区域的提取。
3.3 剑麻株数提取结果分析
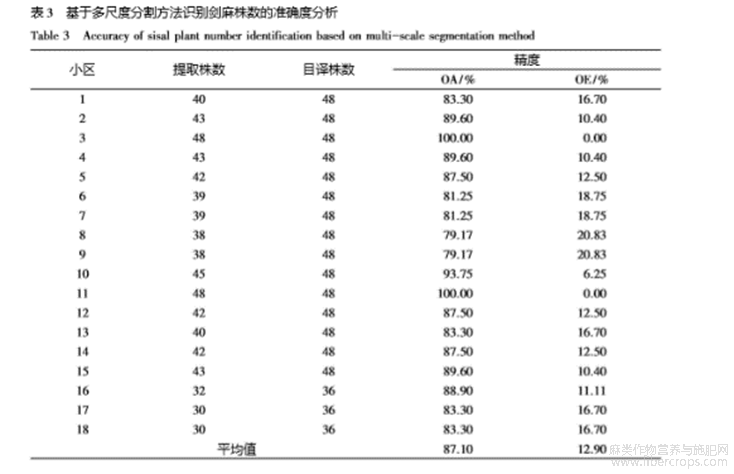
利用excel对导出的若干分割对象进行筛选,统计各小区剑麻株数。根据无人机遥感系统拍摄的冠层图像,目视解译每幅图像中的剑麻株数。结果显示,多尺度分割算法运用于剑麻株数提取中的总体精度为87.1%,总体漏分误差为12.9%;在分割的18个小区中,最大误差为10株,最小误差为0株。分析造成漏分误差的原因,主要是因为多尺度分割过程中存在过分割现象,导致实际为剑麻中心区域的对象被非目标对象分割为多块,如图4右侧剑麻分割图像所示。

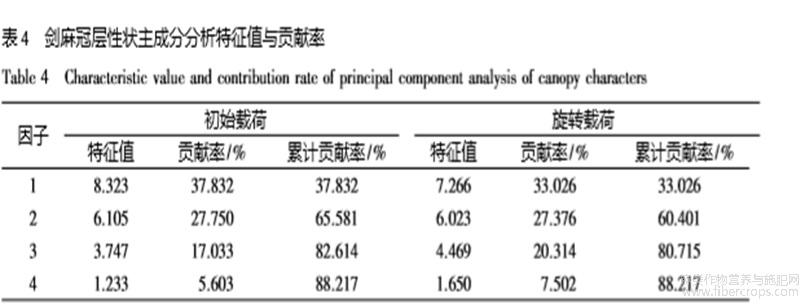
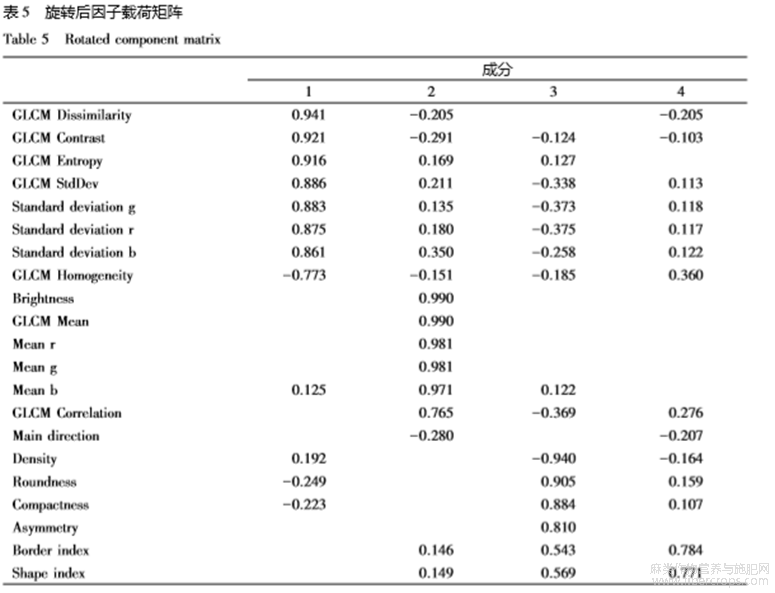
对获取的21个剑麻冠层性状进行主成分分析,获得能够充分反映剑麻冠层性状的综合指标。由表4可知,入选的4个主成分累计贡献率高达88.217%,可以有效反映各性状的主要信息。从抽取的4个主成分中各旋转因子的载荷分布可知(表5),指标GLCMcontrast、GLCMdissimilarity、GLCMentropy在第一成分上有较高载荷,因此第一成分集中反映剑麻纹理特征;指标Brightness、Redmean、Greenmean、Bluemean在第二成分上有较高载荷,相关性强,因此第二成分主要反映剑麻颜色特征;指标Density、Asymmetry、Shapeindex、Roundness、Compactness在第三成分上有较高载荷,因此第三成分反映剑麻形状特征;第四成分中各因子相关性分散,除Borderindex、Shapeindex旋转后载荷绝对值大于0.5,其余各因子相关性都较小。
4 讨论与结论
本研究使用无人机遥感系统获取了剑麻冠层影像,利用面向对象多尺度分割算法对剑麻株数进行自动提取分析。
(1)近年来,无人机低空遥感技术在农作物分类、病虫害识别等领域的应用发展迅速,这主要得益于无人机具有低成本、高效率、操作简单、获取图像分辨率高的特点。然而与地面遥感平台相比,无人机遥感系统获取的空间分辨率仍有限,在复杂环境下实现作物单株分割具有一定挑战性。当前大多数研究均利用深度学习法解决基于无人机遥感影像的图像处理问题,操作复杂。本研究基于剑麻冠层无人机遥感影像,采用了一种简单的图像分割方法对单株剑麻中心区域进行分割识别,为剑麻株数识别提供了一种新的技术。
(2)当前,已有学者基于田间作物冠层影像对作物株数进行识别,刘帅兵等基于无人机遥感影像,利用骨架提取算法结合角点检测提取了玉米苗期植株株数,总体识别率可达97.8%。这种方法的识别率很高,但是算法复杂,且仅适用于苗期作物,难以满足种植密度大、重叠率高的作物株数的识别,具有一定的局限性。本研究采用面对对象多尺度分割方法,基于eCognition软件自动实现剑麻株数提取,总体精度达到87.1%,分割效果较好,操作简便,适用性强。
(3)获取的剑麻冠层遥感图像仅储存了物体红、绿、蓝3个通道信息,单纯使用色彩特征很难实现剑麻株数提取。通过面向对象分类的方法,不仅可以得到单一像素的色彩信息,同时还充分利用了影像对象的单元集合像素,提取了对象的几何特征、纹理特征、上下文等信息,通过融合剑麻的多种图像数字特征,可以提高剑麻与其他对象的分割精度。值得注意的是,特征并非越多越好,为避免数据冗余,本研究采用主成分分析法对剑麻冠层中心区域共21个特征进行降维,其中,第一、二、三成分分别集中表达了剑麻冠层纹理特征、颜色特征、形状特征。在今后的研究中,可进一步依据主成分对单株剑麻进行分割,利用较少的综合变量尽可能最大化反映原来变量的信息,提高剑麻株数提取的准确率。
(4)由于剑麻植株成长阶段不同以及多尺度分割过程中的过分割,使得株数自动统计的精度仍有提升的空间,下一步可以尝试基于神经网络的剑麻株数提取,并比较两种方法的差异。
文章摘自:付虹雨,崔国贤,崔丹丹,佘玮,李绪孟,苏小惠,王继龙,刘婕仪,王昕慧,刘皖慧,赵亮,全芮萍,周倩文.基于无人机遥感影像的剑麻株数识别[J].中国麻业科学,2020,42(06):249-256.
更多阅读
Copyright by Ramie Research Institute of Hunan Agricultural University
湖南农业大学农学院/苎麻研究所 版权所有 2009-2016 湘ICP备10006838号-1
