摘 要:针对胡麻播种机用种量大、播量变异系数大、播种不均匀的问题,基于胡麻种子物理特性和种植农艺要求,设计一种舀种勺舌式胡麻精量穴播器。通过分析穴播器工作原理确定穴播器组成、舀种勺结构参数范围及安装数量;对舀种勺舀种过程和清种过程进行力学分析,确定穴播器角速度范围;通过EDEM仿真过程得知,花纹内壁聚种斜槽在不影响舀种勺填充效果的同时,不仅可以提高仿真效率,还可以增大种子流动性,便于舀种勺充种。以穴播器角速度、舀种勺顶端过渡圆角半径、种室隔离板高度为试验因素,穴播器排种合格率、漏播率和重播率为试验指标,利用EDEM离散元仿真软件开展二次旋转正交组合试验,结果表明:最优参数组合为:穴播器角速度2.9rad/s,舀种勺顶端过渡圆角半径2.5mm,种室隔离板高6.8mm;将该舀种勺3D打印制作进行排种性能试验验证,台架试验得到该舀种勺排种合格率、漏播率和重播率平均值分别为87.00%、6.33%、6.67%;田间试验得到该舀种勺排种合格率为88.33%,漏播率为6.67%,重播率为5.00%;胡麻平均种植密度为50株/m2,其台架试验与田间试验结果基本一致,该性能研究满足胡麻精量播种农艺要求
关键词:胡麻;精量;穴播器;舀种勺;EDEM
胡麻,作为甘肃省特色油料作物,对于当地的经济发展具有一定的提升作用。胡麻种子较小、流动性差是制约胡麻机械化种植的“瓶颈”,也是胡麻规模化生产亟待解决的关键技术问题之一[1]。
实现胡麻精密播种技术的关键是确保排种器排种均匀、稳定[2]-[3]。目前,小籽粒作物精量播种机的研究在发达国家已经达到成熟阶段[4]。代表机型有美国JohnDeere公司生产的7000型精量播种机和ExactEmerge型气吸式播种机,德国Amazone公司研制的ED系列气吸式精密播种机和D9条播机[5]。但是上述播种机价格昂贵、体积较大,并不适合我国西北丘陵ft区胡麻种植。我国西北地区普遍采用人工撒播方式种植胡麻,存在劳动强度大、种植成本高及播种效率低的问题。我国精量排种器的研究相对滞后,国内已研制的胡麻播种机主要有2BY-26型胡麻施肥播种机、BXY-12型胡麻小区播种机等[6],这些机型以条播为主,相对于人工撒播提高了播种效率但仍然存在用种量大、播量变异系数大播种均匀性差的问题。机械式排种器因结构简单、配套性好、制造和使用成本低等优点,在我国拥有广泛的应用前景[7-9]。近几年,胡麻精量穴播种植愈发引起学者的关注,且机械化穴播是实现精量播种的主要方式之一,穴播器作为播种机中最关键的部件,其精确程度直接影响播种机的播种效率。因此针对传统胡麻播种机用种量大、播量变异系数大及播种不均匀等问题,设计一款结构简单高效率的胡麻精量穴播器,对于胡麻机械化生产具有实际意义。
为优化胡麻排种器结构及作业参数,石林榕等[10]针对甘肃省普遍种植的胡麻品种,通过物理试验和仿真试验法测定胡麻本征参数和仿真接触参数,参考仿真和试验结果设计异形窝眼进一步提高窝眼排种轮充种性能,为胡麻播种机的设计奠定基础。国内多位学者针对异形小籽粒种子播种设计了专用排种器。张青松等[11]设计了一种带缺口矩形勺式型孔精量取种的油菜勺式精量穴播排种器,可有效解决传统油菜条播排种器用种量大、株距变异系数大、个体生长不齐等生产实际问题。苏微等[12]设计了一种轮勺式半夏精密排种器,解决了半夏表皮易破损造成播种过程充种困难、易伤种等问题。方梁菲等[13]设计了一种导种环槽U型孔组合轮式排种器,解决前胡种植环节无适用播种装置的问题。廖庆喜等[14]针对芝麻种子球形度低、流动性差导致排种过程充种稳定性差,难以实现精量播种的实际问题,设计了一种采用倾斜齿勺式型孔充种、气送辅助导种的芝麻精量集排器,满足芝麻田间播种要求。胡麻种子呈长扁平状,体积较小表皮易破损,若采用以上排种器进行胡麻播种,会存在取种量过大、伤种严重的问题。鉴于胡麻机械化播种中存在的问题与传统油菜条播时所遇困难相近,本文借鉴机械式油菜精量穴播器主动舀种技术来设计胡麻精量穴播器。
为改善胡麻播种机用种量大、播量变异系数大、播种不均匀的实际问题,结合胡麻种子的机械物理特性和播种农艺要求,设计一种舀种勺舌式胡麻精量穴播器,通过穴播器运动分析、仿真试验和台架试验分析确定穴播器舀种勺最优结构参数并进行田间试验验证。
1 整体结构与工作原理
1.1 整体结构
舀种勺舌式胡麻精量穴播器主要由舀种勺、活动排种嘴、固定排种嘴、复位弹簧、穴播器外壳及旋转轴等部件构成,其结构见图1。固定排种嘴通过螺栓固定于穴播器外壳外侧,活动排种嘴通过销钉与固定排种嘴铰接,复位弹簧支撑在穴播器外壳和活动排种嘴之间便于工作过程中活动排种嘴复位,舀种勺通过紧固件固定于穴播器外壳内侧,用于将胡麻种子从种群中分离,导种筒为穴播器添加种子。
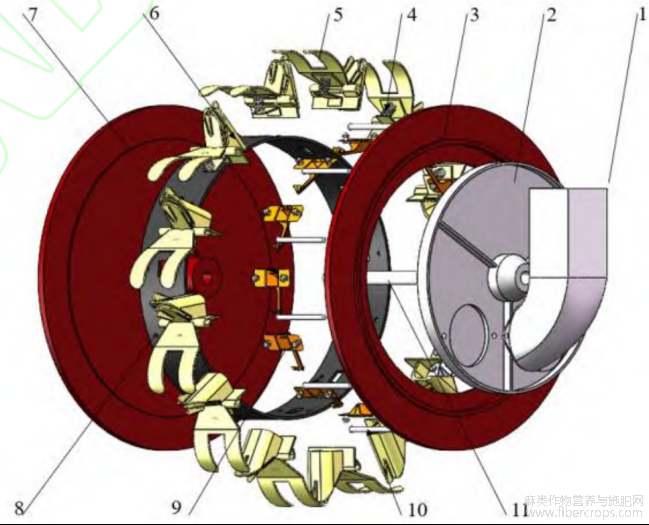
图1 舀种勺舌式胡麻精量穴播器结构图
1.导种筒 2.侧板 3.前壳 4.复位弹簧 5.活动排种嘴 6.固定排种嘴 7.后壳 8.舀种勺固定板 9.舀种勺 10.销钉 11.旋转轴
1.2 工作原理
舀种勺舌式胡麻精量穴播器开始工作时,舀种勺需经历舀种、换位清种、过桥清种、导种和排种5个阶段,如图2所示。在舀种区间,舀种勺随穴播器运动将一定量的胡麻种子从种群中分离,并在舀种勺两侧引种舌的导引下进入勺腔;随着穴播器的继续转动,勺腔表面部分胡麻种子在底部支持力减弱的情况下掉落回穴播器内腔,完成第1次清种;穴播器继续作业时,舀种勺腔内的胡麻种子开始出现沿过桥槽滑动的趋势,舀取的种子沿过桥槽通过种室隔离板滑入种室,过桥槽上部多余种子滑入种室过程时被种室隔离板阻挡掉落回穴播器内腔,完成第2次清种作业。通过种室隔离板的胡麻种子,在导种过程中沿着种室滑道进入排种口伴随着固定排种嘴插入种床,活动排种嘴张开胡麻种子顺利排入穴眼中,完成一个周期的排种作业。
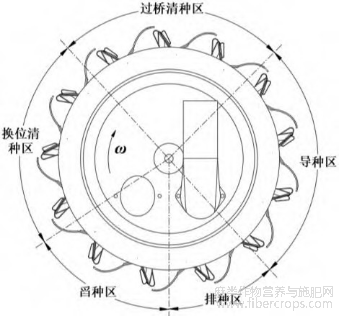
图2 穴播器工作阶段示意图
本研究选取甘肃省农业科学院选育的胡麻品种——陇亚10号为研究对象,试验中随机取100粒种子,用精度为0.02mm的游标卡尺测量其三轴尺寸。每粒重复测量3次,测得种子平均三轴尺寸:长Lmean为4.43mm、宽Wmean为2.38mm、厚Tmean为0.95mm。其他基础参数有千粒质量为8.13g[15],体积密度为0.66g/mL,质量密度为1.05g/mL,自然休止角为23°,含水率为5.13%[10]。
2关键部位设计
2.1 穴播器结构设计
穴播器半径是设计排种嘴个数和穴播器尺寸的主要因素。穴播器大小决定舀种勺数量、排种角速度及充种时间等参数,当播量一定,穴播器半径过大时,会导致播种装置整体结构尺寸变大,播种过程中穴播器跳动现象较为严重,不利于穴播器悬挂[16];当穴播器半径过小时,排种嘴数量、充种时间会相应减少,舀种勺舀种时得不到充分的填充,易产生种子漏充的情况;而且,当穴播器半径过小时,穴播器变轻,影响排种嘴入土深度,进而影响播种均匀性和播种合格率。综合考虑现有舀种勺式穴播器半径取值范围180~240mm,由式(1)[1]确定排种嘴数量为
![]() (1)
(1)
式中 N——排种嘴数目
R——穴播器半径,mm
S——播深,mm
L——株距,mm根据西北寒旱地区农艺要求,胡麻种子每穴排种量6~10粒为合格,胡麻播量保证2.5~3.5kg/hm2;胡麻播深25~35mm,株距120mm[6]。本研究确定胡麻种子每穴排种量8粒,播种深度30mm为最佳。将以上参数代入式(1)得N≈13.4。为保证该舀种勺舌式胡麻穴播器作业时的平稳性,排种嘴数目不宜太多,本研究确定排种嘴数量N=13。舀种勺舌式胡麻穴播器半径与排种嘴的数目和株距有关,计算式[17]为(2)
![]() (2)
(2)
式中![]() ——滑移系数
——滑移系数
由式(2)可知,穴播器半径与排种嘴数量、株距、滑移系数有关。当株距一定时,排种嘴数量与穴播器半径呈正相关,与舀种勺数目对应,即舀种勺数量为13。试验地为砂土,滑移系数约为9.3%[18]。由式(2)得舀种勺舌式胡麻穴播器半径为R≈225.2mm,本研究确定舀种勺舌式胡麻穴播器半径R为225mm,排种嘴高度设计应考虑胡麻播种深度,计算式[19]为(3)
H=S+30 (3)
式中H——排种嘴高度,mm
由式(3)可得排种嘴高度H在55~65mm之间,为保证排种嘴入土效果,本研究采用尖嘴式入土方式,确定排种嘴高度H为60mm。穴播器外径D2为450mm,因此穴播器内径D1为330mm,结构如图3所示。
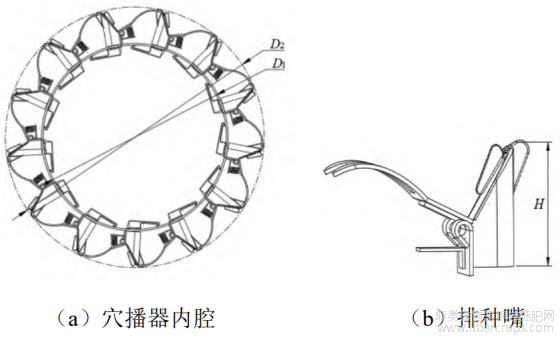
图3 穴播器结构参数示意图
2.2 舀种勺结构设计
舀种勺是穴播器的核心部件,其结构参数影响播种的稳定性和精确性。针对胡麻种子较小不规则、流动性差表皮易破损的特点,本研究设计的舀种勺经过2次更新,针对舀种勺勺腔顶端卡种的问题,将勺腔顶端做过渡圆角处理,然后在舀种勺勺腔两侧设计引种舌便于舀种过程中引种舌内侧胡麻种子填充勺腔,起到二次充种的效果。设计种室隔离板一方面可以防止胡麻种群在相互挤压时逆向进入舀种勺种室内,提高了取种稳定性;另一方面可以将过桥槽表面多余种子阻挡其进入种室,提高播种质量;在舀种勺尾部设计扰种锥,增大胡麻种群流动性,舀种勺结构改进前后对比见图4。
图4 舀种勺改进前后对比
2.1.1 舀种勺勺腔设计
舀种勺主要由舀种勺腔、引种舌、过桥槽、种室隔离板、固定底板及扰种锥组成,舀种勺整体类似于“簸箕”,如图5所示。舀种勺腔的形状体积依据胡麻种子外形尺寸和体积密度综合确定,舀种勺腔体积过大,不利于精量穴播,舀种勺腔偏小,舀种量不足,满足不了农艺要求。
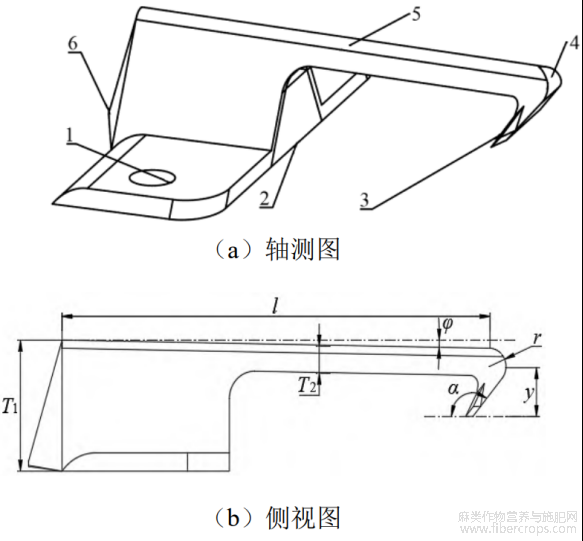
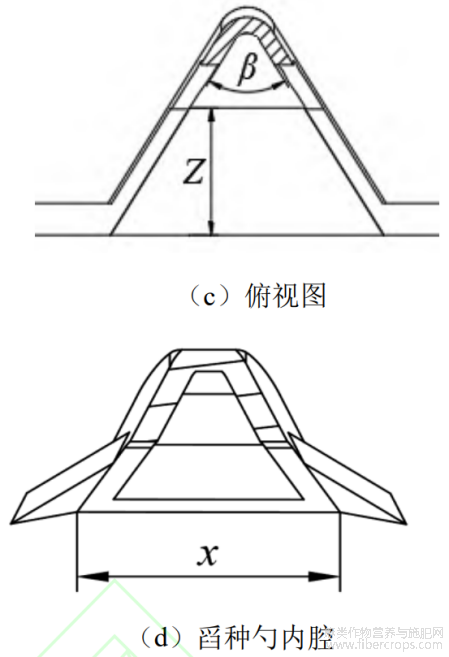
图5舀种勺结构示意图
1.固定底板 2.种室隔离板 3.引种舌 4.舀种勺腔 5.过桥槽 6.
扰种锥
分析穴播器工作过程发现穴播器排种量主要与舀种过程和清种过程有关。为保证该穴播器排种合格率,计算6~10粒胡麻种子填充舀种勺腔体积约为72~120mm3[1],舀种勺腔可近似为顶端为圆角的三棱锥,勺腔体积主要与勺腔宽x、勺腔高y及顶端过渡圆角半径r有关。EDEM仿真试验发现舀种勺舀种时由于过桥槽与舀种勺腔的支撑舀种勺腔体积满足6~10粒胡麻种子填充体积时,舀种量过大;基于此,本研究缩小舀种勺体积减少充种量并设计种室隔离板进行清种。胡麻种子平均长度Lmean=4.43mm,为防止胡麻种子填充时在勺腔顶端卡种,顶端过渡圆角半径r初步定在1.5~2.5mm之间。基于Solidworks软件对异形勺腔体积进行计算,当勺腔宽x为17mm,勺腔高y为4mm,舀种勺腔体积为42~58mm3。参考现有舀种勺确定该舀种勺长度l为50mm,高度T1为15mm。
2.2.2 过桥槽设计
胡麻种子自然休止角为23°,为方便种子从舀种区间过渡到换位清种区间,舀种勺勺腔夹角应比胡麻休止角大,取α为130°。为使胡麻种子可以沿过桥槽壁滑向种室,过桥槽截面夹角β需处于0°~134°。若过桥槽截面夹角β过小,种子从舀种勺勺腔滑向种室过程中易造成雍堵,过大则过桥时间变长,不利于过桥清种,综合考虑β取65°。过桥槽截面高度T2计算式[1](4)为
T2=kbTmean (4)
式中kb——长度调节系数,取2.0~2.2
Tmean——种子平均厚度,mm
过桥槽截面高度T2范围为1.90~2.09mm,本研究确定T2为2mm。
2.2.3 舀种勺倾角设计
为使得舀种勺腔内种子在过桥清种区间时更易沿着过桥槽滑落至种室,将舀种勺设计一定的倾角,由上文理论分析确定该穴播器内径R1为165mm,排种嘴数量为13个,相邻排种嘴对应的中心角为27.7°。为保证舀种勺顺利安装于穴播器内腔,当胡麻种子较少时并不影响舀种勺舀种效果,舀种勺整体高度与舀种勺倾角呈负相关。本研究鉴于传统舀种勺确定其高度T1为15mm,过桥槽截面高度T2为2mm,舀种勺长度l为50mm。图6中黑色三角形的底边太长,舀种勺安装困难;底边过短起不到辅助清种的效果。通过公式(5)得到该三角形底边极限长度T3amx为9mm该舀种勺极限倾角φmax为10.4°;本研究确定舀种勺倾角φ为5°,图中黑色三角形底边长T3为4.4mm。
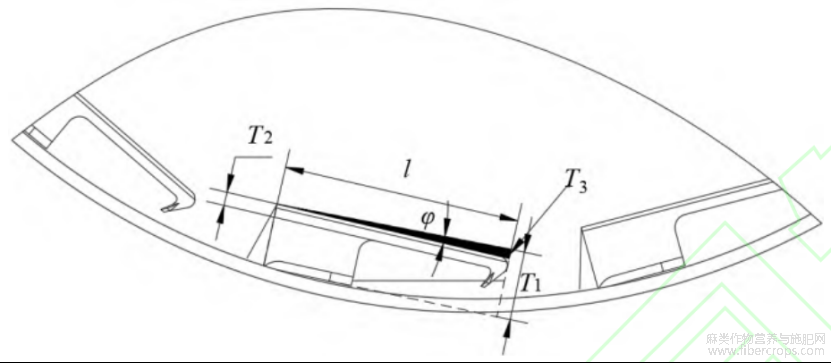
图6 舀种勺结构示意图
 (5)
(5)
2.2.4 种室隔离板设计
由于胡麻种子以无序状态堆积在穴播器腔体内,种室隔离板为防止胡麻种子逆向进入种室,其高度Z应大于平均种子长度Lmean,为保证过桥槽内的胡麻种子顺利进入种室,种室隔离板不能设计过高,应满足式(6)
Zmax=T1-T2-T3(6)
由式(6)可得种室隔离板高度Z的范围为4.0~8.6mm。为便于舀种勺的加工制造,本研究确定种室隔离板高度Z的范围为5~8mm。
2.2.5 引种舌设计
为保证引种舌表面胡麻种子对舀种勺腔达到二次填充的效果,胡麻种子在重力和摩擦力的作用下滑落至舀种勺腔,将引种舌侧面放大如图7所示,对引种舌表面上种子受力分析得
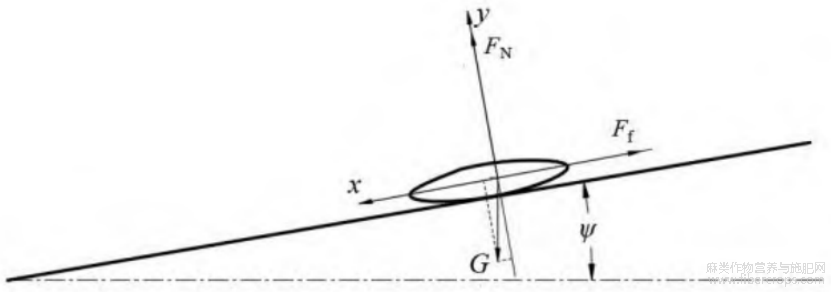
图7 种子在引种舌表面受力示意图
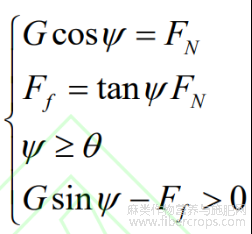 (7)
(7)
式中
G——引种舌表面胡麻种子重力,N
FN——引种舌对胡麻种子的支持力,N
Ff——引种舌对胡麻种子的摩擦力,N
?——引种舌倾角,(°)
θ——胡麻种子与引种舌最大静摩擦角,(°)
本研究舀种勺采用尼龙材料进行打印制作,查阅相关文献[15]可知胡麻种子与尼龙材料静摩擦因数为0.5,则θ约为26.6°,为确保引种舌表面胡麻种子滑落至舀种勺腔,确定引种舌倾角为30°。
3 舀种勺运动过程力学分析
3.1 舀种过程力学分析
为穴播器的角速度影响排种效率和作业质量。充种过程中,胡麻种子在充种区受到扰种锥的扰动,在重力、种群压力和摩擦力等作用下充入勺腔。将勺腔内的种子群视为一个整体,对其质心进行力学分析[13,20],[20]舀种勺舀种过程受穴播器内壁、舀种勺和胡麻种群等影响,对舀种勺充种过程进行受力分析,假设此时舀种勺腔内胡麻种群受力平衡处于相对静止状态,穴播器角速度为ω,胡麻种子与竖直方向夹角为θ1、受力为自身重力G1、与穴播器内壁摩擦力f1、离心力F1和穴播器内壁给予的支持力N1,其受力分析见图8。
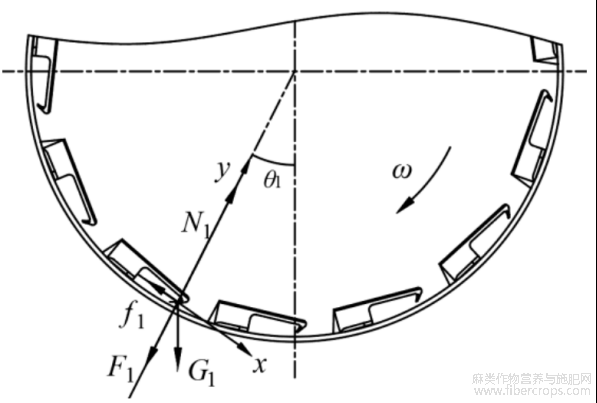
图8 舀种过程受力分析
 (8)
(8)
式中μ——胡麻种子与舀种勺之间的静摩擦因数
m1——胡麻种子质量,kg
R1——舀种勺固定板半径,mm
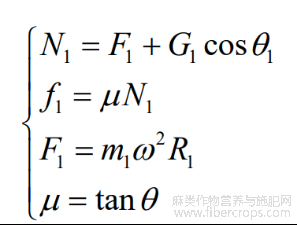
由受力分析可知:将式(8)化简可得当G1sinθ1≥f1时,胡麻种子可以滑进舀种勺腔随舀种勺旋转。通过离散元仿真观察舀种过程发现,穴播器腔体中胡麻种群表层是胡麻舀种的主要来源,因此可以将种群压力忽略不计,将该条件代入式(8)可得
 (9)
(9)
由式(9)可知,舀种勺转动角速度受限于穴播器内径、重力加速度和胡麻种子与舀种勺的静摩擦因数等。舀种勺处于舀种极限位置时θ1为90°,舀种勺固定板半径R1为165mm,要实现舀种勺成功舀种,需满足ω≤11.9rad/s。
3.2 过桥清种力学分析
舀种勺完成取种工作后,继续随穴播器转动进入换位清种区间,此时舀种勺从“站立”状态向“平躺”姿态过渡,舀种勺腔胡麻种子在重力作用下开始滑落至穴播器内腔。上述清种方式依靠种子重力和种子之间的摩擦力完成清种作业,为自然掉落式清种,工作简单不易损坏。经过换位清种区间后,胡麻种子还需经历过桥清种区,舀种勺内腔种子通过过桥清种区时能否继续稳定在勺腔内是决定穴播器极限角速度的关键。若穴播器角速度过大,勺腔内种子所受离心力越大,胡麻种子将被甩出勺腔,导致漏播率上升,不适宜胡麻的精量播种。将过桥槽内的胡麻种群视为一个整体,假设此时胡麻种群受力平衡处于相对静止状态,胡麻过桥清种过程受力分析见图9。
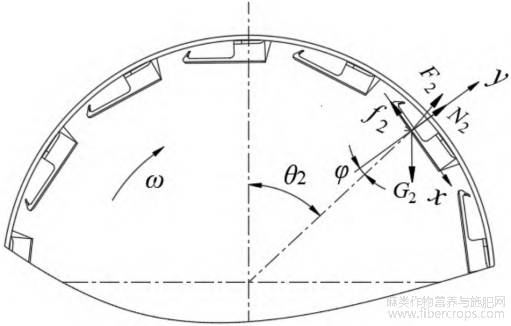
图9 过桥清种受力分析
过桥清种过程中,种子在排种盘径向(y 轴向)与切向(x 轴向)的合力满足
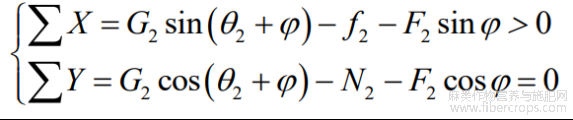 (10)
(10)
其中
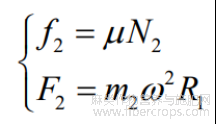 (11)
(11)
式中F2——过桥清种时胡麻种子随穴播器转动所受离心力,N
G2——胡麻种子自身重力,N
N2——过桥槽对种子的支持力,N
θ2——清种区间胡麻种子与竖直方向夹角,(°)
φ——舀种勺倾角,(°)
f2——胡麻种子与舀种勺过桥槽摩擦力,N
m2——过桥槽内胡麻种子质量,kg
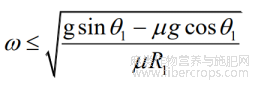
该过程中穴播器角速度较快,种子通过过桥清种区所受离心力F2远大于N2,该过程种子支持力可以忽略不计。由式(10)、式(11)可得
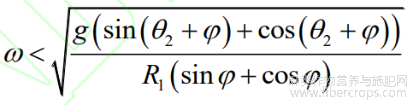 (12)
(12)
由式(12)可知穴播器临界角速度与穴播器内径R1、舀种勺转动角θ2及舀种勺倾角φ有关。为避免多余种子被舀种勺拖带到导种区间,造成重播,过桥清种过程需在舀种勺“平躺”向“站立”姿态过渡时完成,θ2极限值为90°且角速度大于零,式(12)可简化为
0rad/s<ω<7.1rad/s
鉴于穴播器角速度过快,舀种勺舀种和清种时间变短,勺种所受离心力变大,降低穴播器排种稳定性,为提高胡麻排种质量,结合舀种过程受力分析,初步设定穴播器角速度范围为0rad/s<ω≤5rad/s。
4 仿真试验
4.1 仿真模型建立
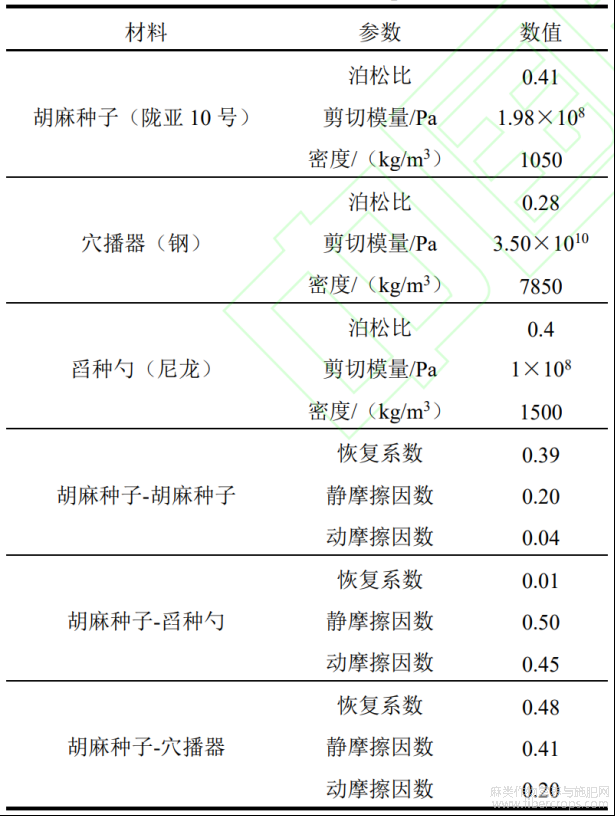
为研究穴播器关键结构参数对排种性能的影响,采用SolidWorks软件绘制胡麻三维模型,并将其导入EDEM2022.2中,按照前期所测胡麻种子外形尺寸进行多球聚合,胡麻种子采用29球面填充,建立胡麻颗粒模型进行仿真试验,基于胡麻种子物理参数和种间几乎无表面粘附力等因素,使用离散元仿真软件EDEM模拟其运动过程时,选用Hertz-Mindlin(no-slip)接触力学模型[22],如图10所示。为减少计算量,仿真过程中将穴播器圆周排种嘴及销钉紧固件去除,仿真模型如图11所示。本试验对胡麻种子颗粒与穴播器材料的相关仿真接触参数进行了测定,结果见表1[14,23-24]。
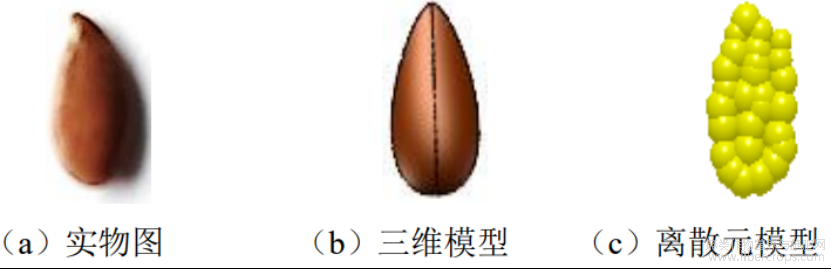
图10 胡麻模型结构
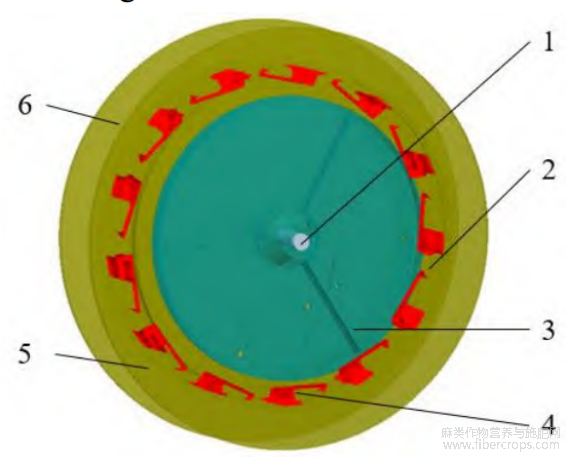
图11 穴播器仿真模型
1.旋转轴 2.前壳 3.侧板 4.舀种勺 5.舀种勺固定板 6.后壳
表1 仿真接触参数
4.2 运动过程仿真分析
本次试验舀种勺长度为50mm、过桥槽截面高度及夹角分别为2mm和65°、顶端过渡圆角半径2.5mm,舀种勺宽为17mm,舀种勺高度为4mm,种室隔离板高度为8mm。此时设计的舀种勺在SolidWorks中计算出舀种勺容积为58mm3,由舀种勺运动过程力学分析确定穴播器角速度范围为0rad/s<ω≤5rad/s,以穴播器角速度3.2rad/s为例胡麻种子生成数量为3000个,仿真总时间1s。排种仿真效果如图12所示。
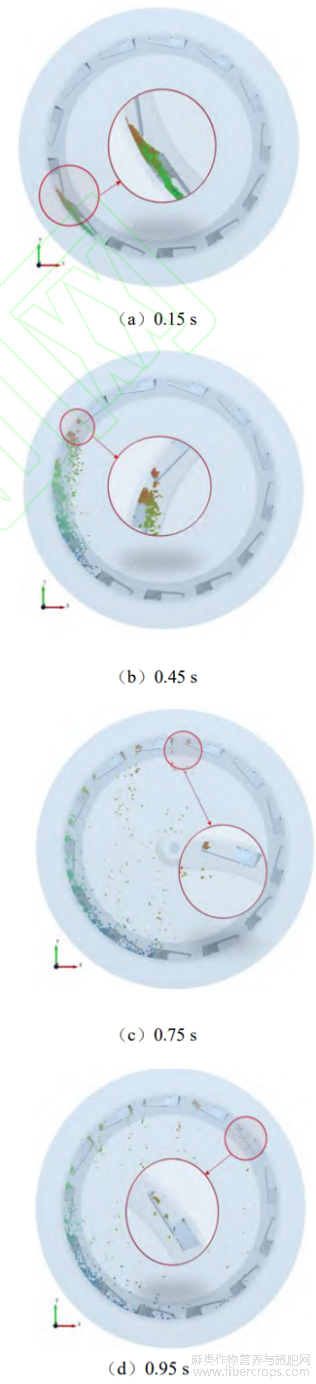
图12 穴播器仿真模型
观察仿真过程发现,生成种子数量较多时舀种勺可以更好的充种,但是仿真效率就会大大降低。为兼顾仿真效率和填充效果,本研究将穴播器内壁设计为截面呈倒梯形的聚种斜槽,当生成种子数量一定时,分散的种子可以沿着聚种斜槽两侧斜面滑落至底部将种子聚合在一起,在不影响仿真效率的前提下,保证舀种勺更好的填充。为确保胡麻种子可以顺利的滑落至底部,两侧斜面与水平夹角应大于胡麻种子的休止角23°,本研究设计夹角为70°,远大于胡麻休止角;且考虑到穴播器工作过程中为增大胡麻种群的流动性,将聚种斜槽内侧表面设计为花纹状,穴播器转动过程中,由于胡麻种群和穴播器内壁摩擦的增大,胡麻种子可以上升更大的高度后掉落。为进一步验证穴播器聚种斜槽内壁对胡麻种群的扰动效果,以穴播器腔体内各时刻胡麻种子动能平均值作为评价指标(动能平均值越大说明种群扰动强度越大,充种性能越好)[21]。试验采用3种不同穴播器内壁和舀种勺组合分别为传统内壁无聚种斜槽(P1)、光滑内壁聚种斜槽(P2)和花纹内壁聚种斜槽(P3),如图13所示;提取分析上述仿真试验条件下舀种勺舀种过程中穴播器内腔胡麻种群总动能分布。
图13 3种不同穴播器内壁和舀种勺组合
对不同穴播器内壁和舀种勺组合下种子总动能随仿真时间变化情况进行考察,仿真总时间设置为1s,仿真进行到0.1s时,生成种子数量一定,有无聚种斜槽舀种勺舀种情况对比见图14。仿真结束后,对不同结构组合作用下舀种区种子总动能数据进行后处理。能量对比如图15所示,3种不同结构组合的穴播器在0.15s左右动能下降是由于此时大部分胡麻种子填充舀种勺向换位清种区间过渡,到0.45s左右种子总动能呈上升趋势,舀种勺运动至过桥清种区间;仿真到1s时种子进入种室总动能缓慢下降,此时胡麻种子受过桥槽支撑相对稳定。综上,种子总动能受P1组合影响最小;受P3组合影响显著高于P1组合,种子流动性较好;受P2组合影响次之。总动能波动趋势与平均动能变化趋势一致,顺序为P3>P2>P1。较高的动能反映较高的扰种强度,因此本研究选择穴播器花纹内壁聚种斜槽,增大种群流动性,便于舀种勺更好填充。
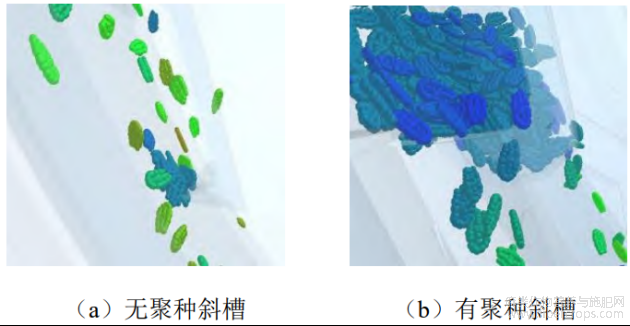
图14 穴播器内腔设计聚种斜槽前后舀种效果对比
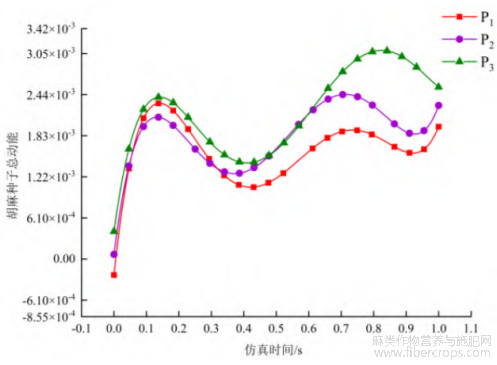
图15 不同结构组合种子总动能随仿真时间变化曲线
4.3 试验设计和评价方案
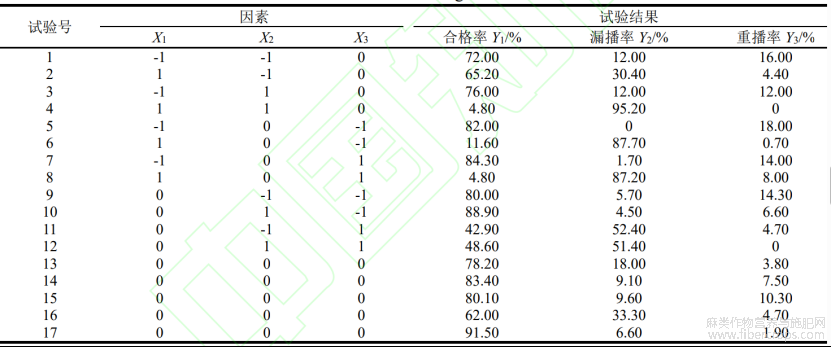
根据舀种勺舌式胡麻穴播器特点及理论分析,确定穴播器角速度、舀种勺顶端过渡圆角半径及种室隔离板高度,为进一步研究这3种试验因素是否存在交互影响及3个因素交互作用对舀种勺舌式胡麻穴播器工作性能的影响,采用二次旋转正交组合试验确定穴播器的最佳作业参数,试验因素编码如表2所示,试验结果如表3所示。
表2 穴播器排种试验因素编码
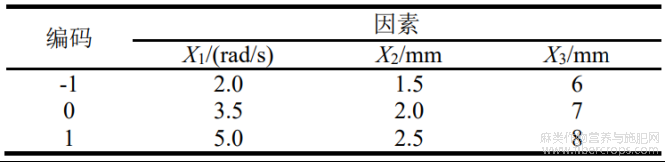
注:X1为穴播器角速度;X2为舀种勺顶端过渡圆角半径;X3为种室隔离板高度,下表同。
表3 排种仿真试验结果
4.4 试验结果分析
利用Design-Expert10软件对本次仿真试验中穴播器工作时的合格率、漏播率和重播率进行方差分析,其显著性检验结果如表4所示。
表4 各指数方差分析
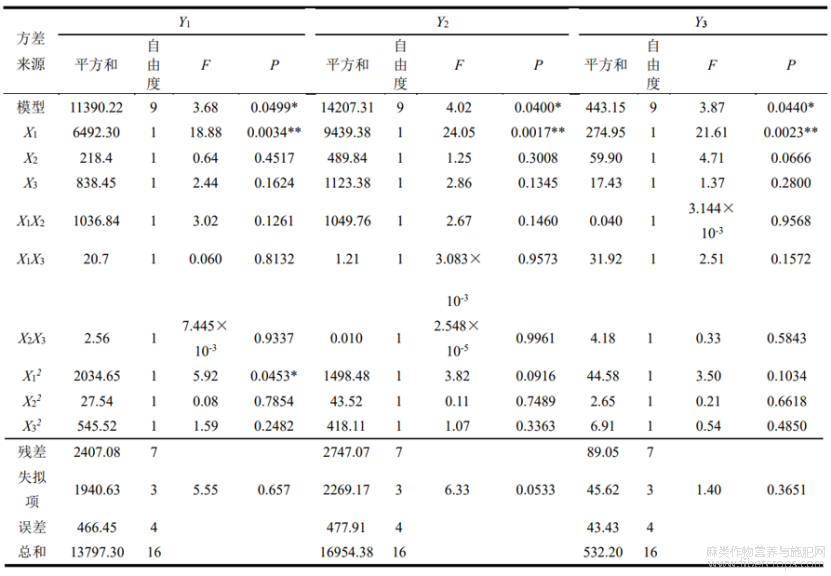
注:**表示极显著(P<0.01),*表示显著(0.01<P<0.05)。
4.4.1 合格率Y1
利从表4中可得,合格率模型的拟合度显著(P<0.05),其失拟项P=0.657,不显著(P>0.05),说明不存在其他影响合格率的主要因素,其回归方程不失拟。影响穴播器排种合格率的主次顺序为穴播器角速度X1、种室隔离板高度X3、舀种勺顶端过渡圆角半径X2。X1影响极显著,X12影响显著,剔除交互项中不显著因素后的回归模型方程为
Y1=79.04-28.49X1-5.22X2-10.24X3-21.98X12 (13)
4.4.2 漏播率Y2
通过Design-Expert10软件对试验数据进行方差分析,其中漏播率模型的拟合度显著(P<0.05),其失拟项P=0.0533,不显著(P>0.05),说明不存在其他影响漏播率的主要因素,影响穴播器漏播率的主次顺序为穴播器角速度X1、种室隔离板高度X3、舀种勺顶端过渡圆角半径X2。X1影响极显著,剔除交互项中不显著因素后的回归模型方程为
Y2=15.32+34.35X1+7.83X2+11.85X3 (14)
4.4.3 重播率Y3
通过Design-Expert10软件对试验数据进行方差分析,其中重播率模型的拟合度显著(P<0.05),其失拟项P=0.3651,不显著(P>0.05),说明不存在其他影响重播率的主要因素,影响穴播器重播率的主次顺序为穴播器角速度X1、舀种勺顶端过渡圆角半径X2、种室隔离板高度X3。X1影响极显著,剔除交互项中不显著因素后的回归模型方程为
Y3=5.64-5.86X1-2.74X2-1.48X3 (14)
4.5 参数优化
为了得到最佳的试验因素水平,结合试验因素的边界条件,通过式(14)~(16)回归方程模型进行优化求解,以穴粒数合格率最大,漏播率、重播率最小为目标,结合各因素试验取值边界条件,建立参数优化数学模型,其目标函数和约束条件为
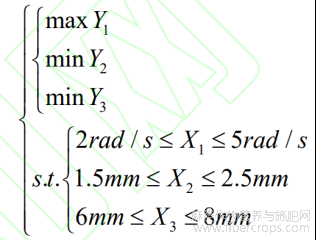
优化结果为:穴播器角速度为2.9rad/s、舀种勺顶端过渡圆角半径为2.5mm、种室隔离板高度为6.8mm。
5 试验验证
5.1 台架验证
为验证穴播器主要结构和运动参数对穴播器排种性能的影响,将最优参数的舀种勺采用3D打印制作进行台架试验验证,材料为尼龙,精度为0.1mm。试验于JPS-12型排种器性能试验台上开展,如图16,该试验台种间距测量精度为±2mm。等到试验台工作一定时间,穴播器角速度稳定之后开始计数,进行6组共记录300组数据,并计算出排种合格率、漏播率和重播率。
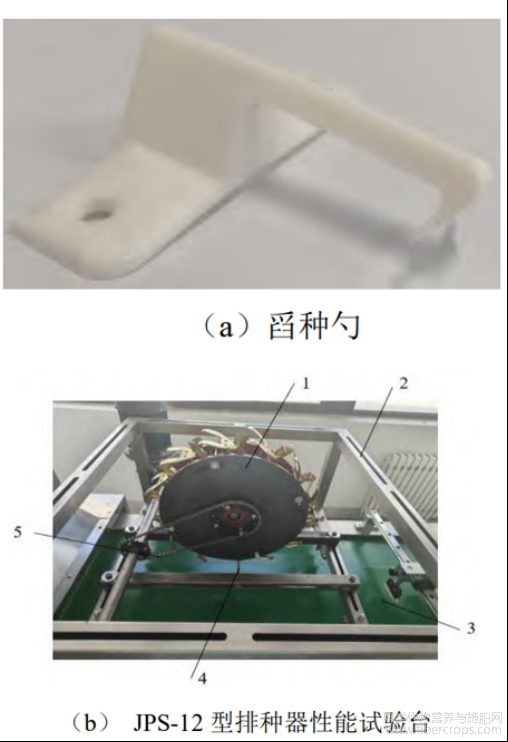
1.穴播器 2.试验台 3.种床带 4.排种嘴拨杆 5.传动装置
图16 台架试验
由于缺乏指导胡麻精量穴播的标准,参考标准GB/T6973-2005《单粒(精密)播种机试验方法》。穴粒数处于6~10粒之间,认为合格;穴粒数小于6粒时,按漏播率计算;穴粒数大于10粒时,按重播率计算。试验结果见表5。
表5 台架试验结果
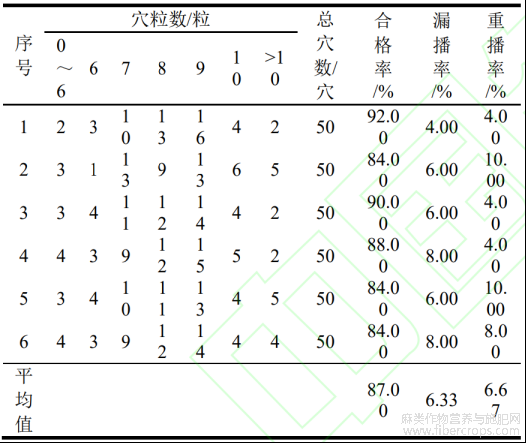
由上述试验结果可知,穴粒数合格率平均值为87.00%,漏播率平均值为6.33%,重播率平均值为6.67%。最佳工作参数组合下的舀种勺作业性能满足胡麻精量穴播对穴粒数合格率、漏播率和重播率的要求。
5.2 田间试验
2023年4月在甘肃省白银市会宁县文兵农机合作社进行穴播器性能田间试验。本试验采用陇亚10号胡麻种子,试验田地势平坦,土壤为沙壤土,含水率为6.61%。播种装置中安装台架试验所测最优参数组合的舀种勺,配套胡麻播种机前进速度0.6m/s,播量为3kg/hm2。田间试验及效果见图17。播后一个月对胡麻出苗率进行统计,每行测20穴,测3行,结果见表6。穴株数合格率(6~10株/穴)达到86.67%,漏播率(<6株/穴)为6.67%,重播率(>10株/穴)为6.66%。胡麻平均种植密度为50株/m2,满足胡麻实际田间穴播要求。
表6 田间试验结果
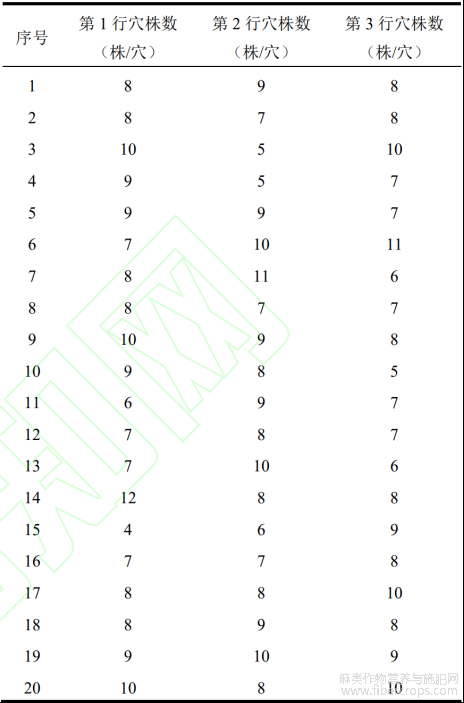

图17 穴播器田间试验
6 结论
(1)针对胡麻播种机用种量大、播量变异系数大及排种不均匀的实际问题,结合甘肃省胡麻种植特点,设计了一种舀种勺舌式胡麻精量穴播器。通过穴播器工作原理分析和理论计算,确定穴播器半径为225mm,排种嘴数量为13个,排种嘴高度为60mm,舀种勺勺腔宽·高为17·4mm,舀种勺顶端过渡圆角半径范围1.5~2.5mm,种室隔离板高度为5~8mm。
(2)通过EDEM仿真分析得知,当生成胡麻种子一定时花纹内壁聚种斜槽不仅可以保证舀种勺充分填充,还增大了胡麻种群流动性。通过二次旋转正交组合试验分析穴播器角速度、舀种勺顶端过渡圆角半径和种室隔离板高度对排种性能的影响,试验结果表明,最优参数组合为:穴播器角速度2.9rad/s、舀种勺顶端过渡圆角半径2.5mm、种室隔离板6.8mm。
(3)将最优参数组合舀种勺3D打印制作进行排种性能试验,台架试验结果表明:穴粒数合格率平均值为87.00%,漏播率平均值为6.33%,重播率平均值为6.67%。田间试验结果为穴株数合格率、漏播率、重播率分别为88.33%、6.67%、5.00%。胡麻平均种植密度为50株/m2,其台架试验与田间试验结果基本一致。
[1] 石林榕,赵武云.西北寒旱农区胡麻滚勺式精量穴播器的设计及试验[J].吉林大学学报(工学版),2023,53(9):2706-2717.SHI Linrong, ZHAO Wuyun. Design and experiment of precision point planter for flax rolling spoon in cold and dry farming area of Northwest China [J]. Journal of Jilin University (Engineering and Technology Edition),2023,53(9): 2706-2717 (in Chinese)
[2] 杨丽,颜丙新,张东兴,等.玉米精密播种技术研究进展[J].农业机械学报,2016,47(11):38-48.YANG Li, YAN Bingxin, ZHANG Dongxing.et al.Research progress on precision planting technology of maize[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(11):38-~48.(in Chinese)
[3] YANG Li, YAN Bingxin, YU Yiming,et al. Global overview of research progress and development of precision maize planters[J].International Journal of Agricultural & Biological Engineering,2016,9(1):9-26.
[4] 杜佳伟,杨学军,刘立晶,等.小粒种子精量播种机研究现状及发展趋势[J].农业工程,2017,7(6):9-13.DU Jiawei, YANG Xuejun, LIU Lijing,et al. Research status and development trend of small seed precision drill [J].Agricultural Engineering, 2017,7(6):9-13. (in Chinese)
[5] ZHAO Z, LI Y M, CHEN J, et al. Numerical analysis and laboratory testing of seed spacing uniformity performance for vacuum-cylinder precision seeder[J]. Biosystems Engineering, 2010, 106(4): 344-351.
[6] 郭军海,赵武云,石林榕,等.西北旱区滚勺式胡麻联合 播种机的设计与试验[J].中国农业大学学报,2022,27(7):184-198.GUO Junhai, ZHAO Wuyun, SHI Linrong, et al. Design and experiment of rolling spoon flax joint drill in Northwest arid region [J]. Journal of China Agricultural University, 2022,27(7):184-198. (in Chinese)
[7] 耿端阳,李玉环,孟鹏祥,等.玉米伸缩指夹式排种器设计与试验[J].农业机械学报,2016,47(5)38-45. GENG Duanyang, Ll Yuhuan, MENG Pengxiang, et al.Design and test on telescopic clip finger type of metering device[J]. Transactions of the Chinese Society for Agricultural Machinery.2016,47(5)3845.(in Chinese)[8] 唐汉.波纹曲面指夹式玉米精量排种器设计及其机理研究[D].哈尔滨:东北农业大学,2018.TANG Han. Design and mechanism analysis of ripple surface pickup finger maize precision seed metering device[D].Harbin: Northeast Agricultural University,2018.(in Chinese)
[9] 耿端阳,张明源,何珂,等.倾斜双圆环型孔圆盘式玉米排种器设计与试验[J.农业机械学报,2018,49(1)68-76. GENG Duanyang, ZHANG Mingyuan, HE Ke, et al. Design and experiment of declined disc plate with double ring corn metering device[J]. Transactions of the Chinese Society for Agricultural Machinery,2018,49(1):68-76.(in Chinese)
[10] 石林榕,马周泰,赵武云,等.胡麻种子离散元仿真参数标定与排种试验验证[J].农业工程学报,2019,35(20):25-33. SHI Linrong, MA Zhoutai, ZHAO Wuyun, et al. Discrete element simulation parameter calibration and seeding test verification of flax seed [J]. Transactions of the CSAE, 2019,35(20):25-33. (in Chinese)
[11] 张青松,余琦,王磊,等.油菜勺式精量穴播排种器设计与试验[J].农业机械学报,2020,51(6):47-54,+64.ZHANG Qingsong, YU Qi, WANG Lei, et al. Design and experiment of precision point seeding device for vegetable spoon [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019,51(6):47-54,+64. (in Chinese)
[12] 苏微,陈子威,赖庆辉,等.轮勺式半夏精密排种器设计与试验[J].农业机械学报,2022,53(9):60-71.SU Wei, CHEN Ziwei, LAI Qinghui, et al. Design and experiment of wheel Spoon Pinellia precision seed discharging device [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022,53(9):60-71. (in Chinese)
[13] 方梁菲,曹成茂,秦宽,等.导种环槽U 型孔组合型轮式前胡排种器设计与试验[J].农业机械学报,2022,53(4):21-32,+51. FANG Liangfei, CAO Chengmao, QIN Kuan, et al. Design and test of U-shaped hole combined wheeled front Hu seed discharger with seed guide ring groove[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022,53(4):21-32,+51. (in Chinese)
[14] 廖庆喜,曹梅,王宝ft,等.齿勺气送式芝麻精量集排器设计与试验[J].农业机械学报,2023,54(8):65-76.LIAO Qingxi, CAO Mei, WANG Baoshan, et al. Design and test of air-fed sesame seed collector with toothed spoon[J]. Journal of Agricultural Machinery, 2023,54(8):65-76. (in Chinese)
[15] 曲浩.全膜覆盖胡麻精量穴播联合作业机设计与试验[D].兰州:甘肃农业大学,2022.QU Hao. Design and experiment of combined operation machine for full film covering flax precision burrowing[D].Lanzhou: Gansu Agricultural University, 2022.(in Chinese)
[16] 张学军,杨莹,周岭.滚筒式穴播器的重要参数选择与确定[J].农业机械学报,1998(增刊):67-70.ZHANG Xuejun, YANG Ying, ZHOU Ling. Selection and Determination of Important Parameters of Drum Drill [J]. Transactions of the Chinese Society for Agricultural Machinery, 1998(Supp):67-70. (in Chinese)
[17] 吴梦隐,魏敏,张立新,等.针对可降解膜鸭嘴式穴播器的结构设计与试验[J].农机化研究,2015,37(6):85-88. WU Mengyin, WEI Min, ZHANG Lixin, et al. For biodegradable film duck-billed dibbling machine structure design and test [J]. Journal of Agricultural Mechanization Research, 2015, 37 (6) : 85-88. (in Chinese)
[18] 顾玲丽.花生穴播器关键部件设计与试验研究[D].南京:南京农业大学,2016.GU Lingli. Design and experimental research on Key Components of peanut burrowing device [D].Nanjing :Nanjing Agricultural University ,2016. (in Chinese)
[19] 周刚.旱地胡麻施肥覆膜穴播联合作业机设计与试验[D].兰州:甘肃农业大学,2020.ZHOU Gang.Design and test of dryland flax fertilization, film mulching, hole seeding combined operation machine [D]. Lanzhou:Gansu Agricultural University, 2020.(in Chinese)
[20] 李兆东,王晴晴,张亚兰,等.倾斜抛物线型孔轮式小麦供种装置设计与试验[J].农业机械学报,2018,49(5):116-124.LI Zhaodong, WANG Qingqing, ZHANG Yalan, et al. Design and experiment of inclined Parabolic type hole Wheel wheat seed Supply Device [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018,49(5):116-124. (in Chinese)
[21] 颜丙新,张东兴,崔涛,等.排种盘和负压腔室同步旋转气吸式玉米精量排种器设计[J].农业工程学报,2017,33(23):15-23.YAN Bingxin, ZHANG Dongxing, CUI Tao, et al. Design of corn precision seed extractor with synchronous rotation of seed tray and negative pressure chamber [J]. Transactions of the CSAE, 2017,33(23):15-23. (in Chinese)
[22] 刘宏新,徐晓萌,郭丽峰,等.具有复合充填力的立式浅盆型排种器充种机理[J].农业工程学报,2014,30(21):9-16. LIU Hongxin, XU Xiaomeng, GUO Lifeng, et al. Seed filling mechanism of vertical shallow basin seed planter with compound filling force [J]. Transactions of the CSAE, 2014,30(21):9-16. (in Chinese)
[23] 吴佳胜,曹成茂,谢承健,等.前胡种子物性参数测定及其离散元仿真模型参数标定[J].甘肃农业大学学报,2019,54(4):180-189.WU Jiasheng, CAO Chengmao, XIE Chengjian, et al. Hu seeds before determination of physical parameters and the discrete element simulation model parameters calibration [J]. Journal of Gansu Agricultural University, 2019, 54(4) :180-189. (in Chinese)
[24] 吴孟宸,丛锦玲,闫琴,等.花生种子颗粒离散元仿真参数标定与试验[J].农业工程学报,2020,36(23):30-38.WU Mengchen, CONG Jinling, YAN Qin, et al. Calibration and experiment of discrete element simulation parameters for peanut seed particles [J]. Transactions of the CSAE, 2020,36(23):30-38. (in Chinese)
文章摘自: 李辉,赵武云,石林榕,戴飞,饶罡,王尊. 舀种勺舌式胡麻精量穴播器设计与试验[J]. 农业机械学报:1-12[2024-01-15]. https://link.cnki.net/urlid/11.1964.S.20240112.1536.023
